|
Listen to this article
 |
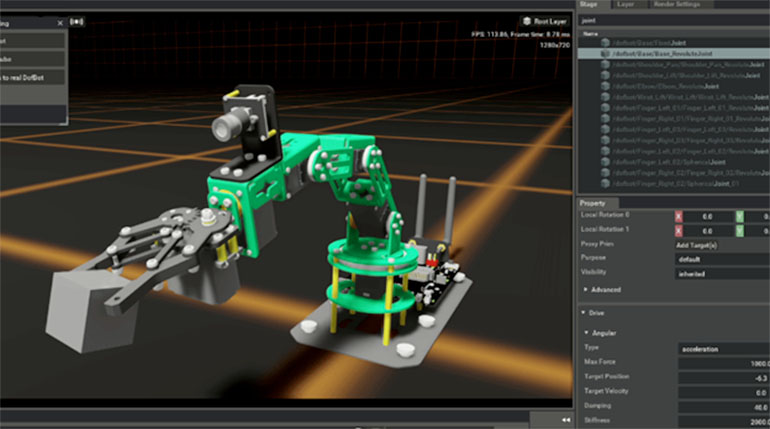
Controlling the Dofbot Manipulation Robot in Isaac Sim. | Image credit: NVIDIA
NVIDIA releases the Isaac Sim version of its NVIDIA Omniverse simulation software. The Issac Sim release is now available in beta for anyone who wants to test their machines. The release encapsulates a variety of new features, including support for ROS2.
Robotic simulation accelerates the development curve
Isaac Sim is a robotics simulation application and synthetic data generation tool. Within Isaac Sim, you can program, train and test any robot design. The simulation environment enables the creation of photorealistic worlds filled with specific objects that the robot can interact with.
The new release also adds improved multi-camera support and a PTC OnShape CAD importer to make it easier to bring in 3D assets to populate the world. Synthetic data can be generated from the robot’s interactions within the world to help train sensor and perception algorithms. This allows developers to start software development long before a physical prototype of the robot has been constructed.
Summary of key new features
- Multi-Camera Support
- Fisheye Camera with Synthetic Data
- ROS2 Support
- PTC OnShape Importer
- Improved Sensor Support
- Ultrasonic Sensor
- Force Sensor
- Custom Lidar Patterns
- Downloadable from NVIDIA Omniverse Launcher
Isaac sim enables more realistic simulation
Developers who are leveraging a NVIDIA computing platform now have a simulation environment that will shorten development cycles and provide feedback to the rest of the design team through its realistic simulation capabilities. By modifying the code, the physical characteristics of the robot or even the simulated world, roboticists can more quickly test and validate their solution concepts. Isaac simulation is key to the “fail fast and iterate” design philosophy.
Isaac Sim leverages the Omniverse platform’s powerful technologies including advanced GPU-enabled physics simulation with PhysX 5, photorealism with real-time ray and path tracing, and Material Definition Language (MDL) support for physically-based rendering. It also is capable of simulating both fixed and mobile robot applications.
Isaac Sim benefits from Omniverse Nucleus and Omniverse Connectors, enabling collaborative building, sharing, and importing of environments and robot models in Universal Scene Description (USD). Easily connect the robot’s brain to a virtual world through Isaac SDK and ROS/ROS2 interface, fully-featured Python scripting, plugins for importing robot and environment models.
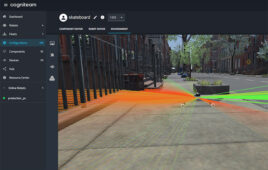
Synthetic data generation shortens the machine learning cycle
With Isaac sim, synthetic Data Generation is an important tool that is increasingly used to train the perception models found in today’s robots. Getting real-world, properly labeled data is a time consuming and costly endeavor. But in the case of robotics, some of the required training data could be too difficult or dangerous to collect in the real world. This is especially true of robots that must operate in close proximity to humans.
Isaac Sim has built-in support for a variety of sensor types that are important in training perception models. These sensors include RGB, depth, bounding boxes, and segmentation.
For more specific details, check out the Isaac simulation article on the NVIDIA blog.






Tell Us What You Think!