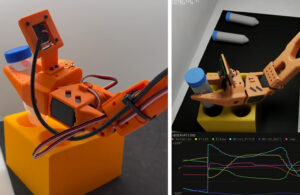
Hugging Face LeRobot is an open-source robotics library for training, running, and sharing robot datasets, models, policies, and workflows.
ENCY Software and Stäubli Robotics partner to simplify robot programming
ENCY Software and Stäubli Robotics have signed a global agreement to make robot programming more intuitive, faster, and more accessible.
Boston Dynamics brings its legged robots to the FIFA World Cup

Around the 2026 FIFA World Cup, Hyundai and Boston Dynamics have taught footwork to the Atlas humanoid, while the Spot robot is on patrol.
RoboBusiness 2026 call for speakers closes soon

RoboBusiness 2026, the premier event for developers of commercial robotics and those building robotics businesses, is seeking expert speakers.
MBody AI expands service robotics operations to eleven states and Canada

MBody AI has deployed its hardware-agnostic Orchestrator platform to Florida and California, with a pilot in Ontario.
We know how to build smarter robots. Now, we need to learn smarter ways to test them
Atharv Kolhar, a staff test automation engineer at Figure AI, says the robotics industry needs a testing philosophy that scales alongside autonomy.
Vention collaborates with FANUC and Universal Robots on software-defined automation

Vention is working with partners to make design and deployment of industrial and collaborative robots easier for manufacturers.
Why physical AI 2.0 needs a reality check

While vision and language are key parts of physical AI, physical state recovery will enable robots to interact with the world, says a columnist.
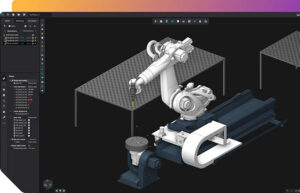
Eclipse Automation launches RealitySync simulation platform

Eclipse said its new RealitySync platform allows manufacturers to step into their future factory before it’s built.
Fennec Engineering earns T2 qualification for Advanced Safety Acceleration Platform

Fennec Engineering has obtained certification confirming that its automated traceability platform meets strict safety standards.
Autonomique deploys semi-humanoid robots and AI at Canadian Tier 1

Autonomique has moved its AI-powered robots from pilot to production at F&P Mfg., with plans for deployment across F-tech’s global network.
Robotics Summit panel explores the state of humanoid robot design

At the Robotics Summit & Expo, experts weighed in on humanoid robotics today — and the ability to achieve a $20,000 price point tomorrow.
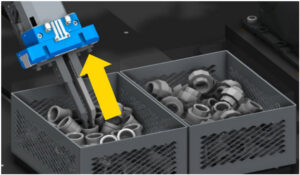
Inside XRZero-G0, a new 2,000-hour open dataset for robotics research

X Square Robot has open-sourced XRZero-G0, a framework that reduces real-robot training data requirements by up to 20x.
NEURA Robotics to raise up to $1.4B in Series C funding for physical AI

NEURA Robotics plans to expand its platforms for robot learning and global production of humanoids and other systems.
Mitsubishi Electric opens Serendie Street Boston digital transformation hub

Mitsubishi Electric opened Serendie Street Boston, its first Western digital transformation hub dedicated to collaboration and innovation.
NVIDIA releases new and updated tools for physical AI developers

NVIDIA has released open-source physical AI agent skills and tools, as well as an Isaac GR00T humanoid reference robot.
Top 10 robotics stories of May 2026

May 2026 was a busy month full of robotics news, and it was topped off by the Robotics Summit & Expo in Boston.
Software becoming the biggest bottleneck to physical AI innovation, finds QNX research

As robots enter more unconstrained environments, software and security are becoming higher priorities, a QNX survey found.
Simulation vs. digital twin: A strategic lens on virtual manufacturing

Digital twins and simulation provide distinct benefits for manufacturers designing and integrating systems including automation, explains Visual Components.
FANUC partners with Google to advance physical AI in its robots

Since FANUC released its physical AI system at IREX in Tokyo, customer interest has grown rapidly, and it is working with Google and NVIDIA.
FANUC strengthens robot integration with NVIDIA Isaac Sim
FANUC is integrating its robots and teach pendant with NVIDIA simulation and AI technology for smoother, smarter action.
How agentic AI can enable general-purpose robotic navigation

Learn how agentic AI enables robotic navigation by combining perception, SLAM, reasoning, and planning in dynamic environments.