
In this episode, Dr. Aaron Ames takes us down memory lane with a history of bipedal robotics and then introduces us to 3Laws Robotics.
Top 5 robotics trends for 2024, according to the IFR

The IFR has cited technology trends including the rise of generative AI, mobile manipulation, and humanoid robots for 2024.
Formic focuses on ease of use with new robot software
The Chicago-based RaaS provider has launched software to make robot-based manufacturing available to companies without in-house expertise.
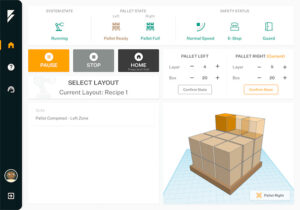
Jacobi Robotics shortens robot programming cycle in partnership with Formic
Jacobi Robotics has launched new path-planning and optimization system with Formic to accelerate palletizing applications.
Flexxbotics gets support to add robots to production from co-founder of SOLIDWORKS, Onshape

Flexxbotics has raised funding and received advice to provide its robot process-control software to more manufacturers.
MassRobotics discusses university Form and Function Challenge and partnerships

MassRobotics and its technology partners will announce the winners of the Form and Function challenge at the Robotics Summit & Expo.
Synopsys to acquire Ansys to join forces for silicon-to-system design, simulation, and analysis

Synopsys is adding Ansys’ simulation to its testing and electric design tools to help developers engineer more complex systems.
Flexxbotics enables connectivity with FOBA Laser Marking + Engraving equipment

With robot-driven operation of FOBA equipment, customers can achieve continuous operation, greater throughput, and higher yields, claimed Flexxbotics.
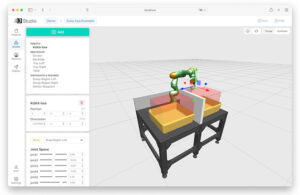
Toyota, READY Robotics to introduce sim-to-real robot programming using NVIDIA Omniverse

READY’s ForgeOS operating system and NVIDIA Isaac Sim on Omniverse offer Toyota ease of programming and realistic simulation.
Ansys, NVIDIA team up to test autonomous vehicle sensors
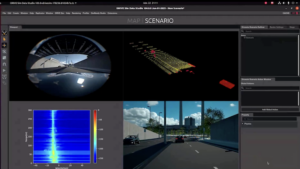
Integration will enable engineers to simulate accurate camera, lidar, radar and thermal camera sensors to train autonomous vehicles.
New version of Open-RMF hits ROS 2

The Open Robotics Middleware Framework is open-source, modular software that enables interoperability between robot fleets and physical infrastructure.
Valiant TMS and Realtime Robotics partner to cut programming, cycle times
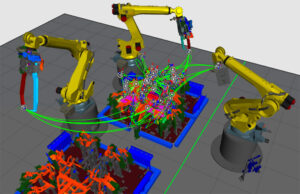
Valiant TMS and Realtime Robotics said manufacturers can use the Optimization-as-a-Service system to reduce production bottlenecks.
Generative AI and Isaac to power smarter robots, says NVIDIA before CES

Generative AI and large language models can improve robot training, perception, and human-machine interactions, says NVIDIA and its partners.
5 robotics trends to expect in 2024

With 2023 in the rearview mirror, it’s time to look ahead to what 2024 has in store for the robotics industry.
How to do instantaneous mode switching with servo motors
Instantaneous mode switching can help smooth transitions between different servo motor control modes in complex motion applications.
Formant’s data platform comes to Softbank’s cleaning robots

Softbank said Formant’s data platform will help customers get the most out of their investments in robots.
Outrider releases latest AI-driven perception technology to accelerate yard automation

Outrider has updated its perception technology to enhance yard safety and efficiency as it looks to new capabilities and markets in 2024.
GreyOrange gets Series D support to further develop orchestration platform, mobile robots

GreyOrange has raised $135 million to continue helping retailers and warehouses automate and orchestrate fulfillment.
NVIDIA Jetson supports Zipline drone deliveries, as Omniverse enables Amazon digital twins

NVIDIA technologies are helping supply chains add new levels of automation, as seen in its work with Adobe, Amazon, and Zipline.
USC helping robots quickly learn new tricks
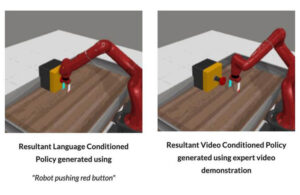
RoboCLIP algorithm has been pre-trained on large amounts of video and textual demonstrations.
Mujin finalizes Series C extension for logistics robot controllers
Mujin, which has raised a total of $178 million, plans to make its MujinController more accessible to developers.
SRI International designs XRGo to protect pharmaceutical workers through teleoperation

SRI International says its XRGo teleoperation capability could help ensure pharmaceutical quality and open up jobs to a wider range of candidates.