
Matt Casella from Richtech Robotics introduces the Adam AI-powered robot, and Chris Padwick from John Deere discusses training machine learning for perception.
Electric Sheep wins 2024 RBR50 Startup of the Year

Electric Sheep has a novel business model and agile development team that make it first winner of the RBR50 Startup of the Year.
Autopicker wins 2024 RBR50 Application of the Year for Brightpick

Autopicker combines AI, vision-guided picking, and a mobile base to be the first winner of the RBR50 Application of the Year.
Kiwibot acquires AUTO to strengthen delivery robot security

Kiwibot and AUTO Mobility Solutions say their merger will advance data protection and robotic services globally.
OmniOn looks to power, network next-gen delivery robots

OmniOn Power says that mobile robots, AI, and self-driving vehicles need more power and networking innovation.
Zoox gets ready to launch robotaxi service in Las Vegas

Zoox is expanding its area of robotaxi operations in Las Vegas as it prepares to launch a public service later this year.
Northeastern University Mars Rover Team wins Winter Canadian International Challenge

Northeastern University students won a contest in which four teams’ rovers completed tasks in simulated Martian environments.
Opteran to bring natural intelligence to SAFELOG mobile robots

By working with Opteran, SAFELOG says it is developing a new generation of mobile robots with robust and efficient navigation.
Slamcore Aware provides visual spatial intelligence for intralogistics fleets

Slamcore Aware combines the Slamcore SDK with industrial-grade hardware to provide robot-like localization for manually driven vehicles.
Afara launches autonomous picker to clean up after cotton harvest

AFARA-COTTON uses a variety of sensors to autonomously detect and pick up cotton dropped during mechanical harvest.
Electric Sheep Verdie robot uses large world models for autonomous landscaping

Electric Sheep Robotics said its latest robot, Verdie, uses AI and large-world models to work alongside landscaping crews.
Locus Lock promises to protect autonomous systems from GPS spoofing
Locus Lock has developed software-defined radio to overcome GPS spoofing for more secure autonomous navigation.
RoboGuide robot dog uses AI to assist the visually impaired

Technologies such as RoboGuide could enable people with visual impairments to more fully navigate and interact with the world.
Stretch 3 from Hello Robot designed for open-source mobile manipulation

Stretch 3 is a portable and lightweight platform for robotics developers and could lead to household applications.
RoboXchange examines real-world operational challenges and new brains for robots

At the first MassRobotics RoboXchange, Locus Robotics shared tips on warehouse challenges, and Opteran showed a new navigational approach.
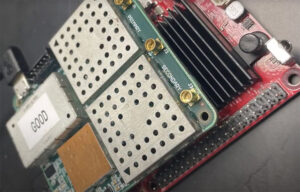
The role of ToF sensors in mobile robots
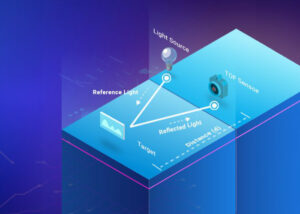
Time-of-flight or ToF sensors provide mobile robots with precise navigation, low-light performance, and high frame rates for a range of applications.
KEF Robotics takes a modular approach to aircraft navigation and autonomy

KEF Robotics says its vision software works with different hardware and software to enable drones to navigate in GPS-denied environments.
Top 10 robots seen at CES 2024
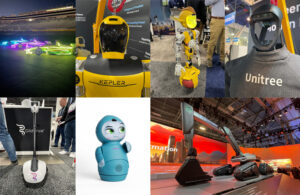
A quick look at some of the most noteworthy robots at the 2024 CES show in Las Vegas.
Sevensense acquisition to add VSLAM smarts to mobile robots, says ABB

Sevensense, which has developed Visual Simultaneous Localization and Mapping for mobile robots, has grown from a partner to a unit of ABB.
Indy Autonomous Challenge announces new racecar and additional races

The Indy Autonomous Challenge announced a completely new sensor and compute architecture for the AV24 racecar.
Eyeonic Vision System Mini unveiled by SiLC Technologies at CES 2024

SiLC says its new Eyeonic Mini AI machine vision system provides sub-millimeter resolution at a significantly reduced size.
5 robotics trends to expect in 2024

With 2023 in the rearview mirror, it’s time to look ahead to what 2024 has in store for the robotics industry.