
Self-driving vehicle developers say different approaches to AI are safer than human drivers, but critics are skeptical after accidents.
ANYmal legged robot gets 100th golden delivery from ANYbotics

ANYmal is conducting autonomous and remote inspections at DSM-Firmenich as ANYbotics marks century milestone.
LimX Dynamics shows off its CL-1 humanoid’s stair climbing abilities

LimX Dynamics’ CL-1 completed tasks like climbing stairs and walking down slopes both inside and outside.
NVIDIA picks 6 noteworthy autonomous systems of 2023
NVIDIA picks robots that showed special prowess — swimming, diving, gripping, seeing, strolling and flying — through 2023.
Top 10 most popular robotics stories of 2023

In the robotics industry, 2023 was the year of the humanoids. They dominated the news cycle, and our most popular content was no exception.
Outrider releases latest AI-driven perception technology to accelerate yard automation

Outrider has updated its perception technology to enhance yard safety and efficiency as it looks to new capabilities and markets in 2024.
GreyOrange gets Series D support to further develop orchestration platform, mobile robots

GreyOrange has raised $135 million to continue helping retailers and warehouses automate and orchestrate fulfillment.
NVIDIA Jetson supports Zipline drone deliveries, as Omniverse enables Amazon digital twins

NVIDIA technologies are helping supply chains add new levels of automation, as seen in its work with Adobe, Amazon, and Zipline.
Northeastern students develop robotic boat to attack invasive plants

Northeastern University researchers have developed the Hydrilla Hunter, a robot designed to detect invasive plants in rivers.
RoboBusiness Pitchfire winner Glidance helping sight-impaired individuals regain independence

An in-depth conversation with Amos Miller, CEO and cofounder of Glidance, the 2023 RoboBusiness Pitchfire winner.
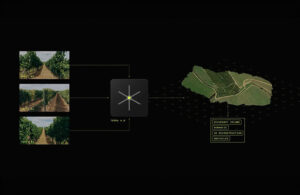
Trimble provides real-time, centimeter-level accuracy for Sabanto autonomous tractors

Sabanto has integrated GNSS receivers and corrections service from Trimble into its systems to make positioning more precise.
Tesla demonstrates Optimus Gen 2 dexterity, recalls 2M vehicles

Tesla released a video showing the improving capabilities of its Optimus humanoid robot, but it faces safety scrutiny over Autopilot.
LIG Nex1 intends to acquire stake in quadruped maker Ghost Robotics

LIG Nex1 and a partner have offered to acquire 60% of industrial and defense supplier Ghost Robotics, which is valued at $400 million.
Terra AI provides 4D perception for robot navigation, manipulation
Terra AI is part of Stereolabs’ vision technology stack intended to provide more accurate perception to autonomous systems.
Stevens Institute for Artificial Intelligence looks at prospects for AI and robotics

The Stevens Institute for Artificial Intelligence’s director shares his perspectives on AI policy, generative AI, and machine learning and legged robots.
Brown researchers simplify human-to-robot communication with large language models

Researchers at Brown University’s Humans to Robots Laboratory have developed software that helps robots understand plain-worded instructions.
BrainOS Site Maps add insights for AMR fleets

Fleet manager can train more efficient routes for their mobile robots, plan optimized schedules, and identify areas that need additional attention.
This CMU system can turn any robot into an autonomous explorer

The Autonomous Exploration Research Team’s systems allow robots to find their way in new places and create a map without human intervention.
ABB transforms AMR performance with launch of Visual SLAM technology

ABB Robotics is introducing VSLAM to its Autonomous Mobile Robots (AMRs). ABB AMRs can use their surroundings to plan and avoid obstacles.
Capra Robotics’ AMRs to use RGo Perception Engine

RGo Robotics, a company developing artificial perception technology, announced leadership appointments, new customers and an upcoming product release.
How Amazon Astro moves through its environment

Amazon counteracts Astro’s lack of computation capabilities with algorithms and software designed to allow the robot to move more gracefully.
Linux Foundation launches Overture Maps Foundation

The Linux Foundation announced it formed the Overture Maps Foundation, a collaborative effort to create interoperable open map data.