
SUPCON has debuted its new humanoid for R&D and industrial use at the new Zhejiang Humanoid Robot Innovation Center.
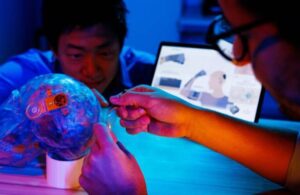
Project CETI develops robotics to make sperm whale tagging more humane

Project CETI is using robotics, machine learning, biology, linguistics, natural language processing, and more to decode whale communications.
CMU, NASA JPL collaborate to make EELS snake robot to explore distant oceans

NASA scientists hope to use EELS to search for signs of life in the ocean beneath the icy crust of Saturn’s Enceladus moon.
Massachusetts governor visits MassRobotics to celebrate National Robotics Week
Massachusetts Gov. Maura Healey also visited a high school robotics team and touted a bill proposing innovation investment.
Robotics innovation is key to reshoring the $1T apparel manufacturing industry

Lack of onshore garment manufacturing is both a national security risk and a lost business opportunity. Robotic sewing could be the answer.
Southwest Research Institute to make robot programming more user friendly with SWORD
The Southwest Research Institute offers the SwRI Workbench for Offline Robotics Development for motion-planning applications.
Northeastern University Mars Rover Team wins Winter Canadian International Challenge

Northeastern University students won a contest in which four teams’ rovers completed tasks in simulated Martian environments.
Labor shortages still driving robotics adoption, finds HowToRobot

HowToRobot said its findings confirm that businesses see robots and automation as a supplement to human labor, not a replacement.
Stanford researchers aim to enhance robots with augmented motors

Researchers at Stanford have invented a way to augment electric motors to make them more efficient at performing dynamic movements.
Learn about generative AI’s impact on robotics at the Robotics Summit & Expo

Researchers are already using generative AI to make robots faster learners, and a summit panel will discuss how this technology can be applied to robotics at scale.
Researchers develop interface for quadriplegics to control robots

Head-Worn Assistive Device impresses expert evaluator Henry Evans during a trial to control Hello Robot’s Stretch mobile manipulator.
Punyo is a soft robot from TRI designed for whole-body manipulation

TRI’s Punyo humanoid robot can manipulate objects with its whole body, giving it more flexibility when it comes to household tasks.
Researchers debut TWIN lower limb exoskeleton

TWIN is a motorized exoskeleton designed to be customized to enhance the physical abilities of each wearer.
MIT AI model promises to simplify path planning in warehouses

MIT AI experts have applied a deep-learning model that can decongest robots nearly four times faster than typical strong random search methods.
New computer model could help robots collect Moon dust

Robots have emerged as a method to collect regolith due to their lower risks and costs compared to human spaceflight.
New Wyss project aims to control exosuit with brain signals
The Wyss Center’s Synapsuit project aims to develop high-performance algorithms that decode complex brain signals.
RoboGuide robot dog uses AI to assist the visually impaired

Technologies such as RoboGuide could enable people with visual impairments to more fully navigate and interact with the world.
Surgical robots don’t improve knee surgery revision rates, study says

An analysis of American Joint Replacement Registry data found that revision rates were similar in conventional and surgical robot knee procedures.
Top 5 robotics trends for 2024, according to the IFR

The IFR has cited technology trends including the rise of generative AI, mobile manipulation, and humanoid robots for 2024.
ProGlove study shows retail managers are cautiously optimistic about automation

The results of ProGlove’s survey show retail leaders have conservative expectations for adopting automation.
CMU crawling robots map and repair natural gas pipelines
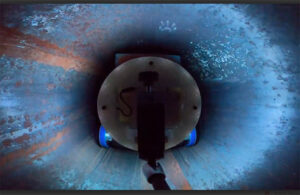
The CMU team’s modular robots crawl inside gas pipelines to map, detect decrepit or leaking pipes, and perform repairs.
AI job automation will happen gradually, says MIT CSAIL

MIT CSAIL’s research examines the economic practicality of using AI for automating tasks, with a particular emphasis on computer vision.