|
Listen to this article
 |
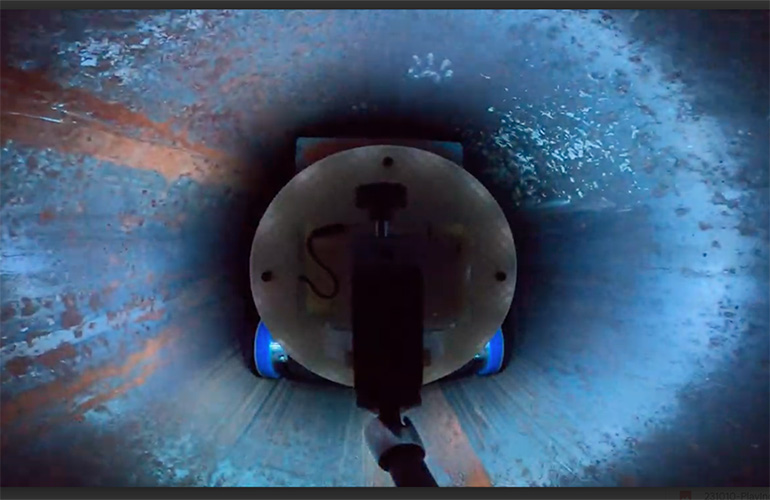
CMU pipe-repair robots crawl into natural gas pipelines and coat them. | Source: Carnegie Mellon University
Researchers at Carnegie Mellon University’s Robotics Institute are creating robots that can map and repair natural gas pipelines. The team is led by Howie Choset, the Kavčić-Moura professor of computer science at CMU, who plans to commercialize the robot later this year.
The CMU team’s modular robots crawl inside natural gas pipelines to map the lines, detect decrepit or leaking pipes, and repair them by applying a resin coating along its inner wall. Underground pipelines carry natural gas to 75 million homes and more than 5 million commercial customers in the U.S., according to the U.S. Department of Energy (DoE).
This gas is carried through a network of 1.2 million miles of distribution main lines and 900,000 miles of service lines. These pipes are expensive and difficult to repair. They’re too small for humans to fit into, and some are so old that they’ve never been mapped. If left unattended, however, the pipes will continue to decay.
“We’re going to see pipes bursting more often, we’ll start talking about lines going down more and more often, because we’re not going to be proactive in addressing our pipe infrastructure,” Choset told The Robot Report.
“The pipe networks in the United States are decaying, and we have to replace or repair them,” he said. “We don’t even know where the pipes are or the status of these pipes, so the very first step is just mapping where the pipes are.”
Challenges come with work in tight spaces
Choset’s team at CMU Robotics Institute has specialized in snake robots in the past. This is what put it on the radar of the DoE, which is sponsoring the project through the Advanced Research Projects Agency-Energy and its Rapid Encapsulation of Pipelines Avoiding Intensive Replacement program.
“People reached out to us because of our work with snake robots, but because pipes are relatively well-structured environments, we were able to make robots that were specific to the pipe environment,” Choset said.
Instead of building a snake robot, Choset and his team decided to create a crawling robot.
“We built some pipe-crawling robots, and we certainly are not the first to build pipe-crawling robots,” Choset said. “But what makes ours different from others is that they’re very strong. They can carry a heavy weight. They have the potential, and I stress that word ‘potential,’ to do some kind of repair. The current capability that we’re very proud of is mapping, that’s the first critical step.”
The CMU team’s robot sits on a pair of 2-in. wheels and has a third wheel atop the module. The robot has three wheels because both the pipe-repair resin and the batteries that power the robot can be heavy, so it needs to have enough traction to pull up to 60 lb. of payload.
The robot can inspect about nine miles of pipe in eight hours and can repair about 1.8 miles of pipe in the same amount of time.
To build these robots, the CMU team couldn’t use typical sensors, like lidar and radar, so they developed a high-resolution optical sensor that would work in tight spaces. Choset said he’s currently seeking a patent for these sensors.
“The mere physics of how those sensors work don’t lend themselves nicely to being in a tight space,” Choset said. “We figured out how to create lidars and vision systems that work in tight spaces.”
The sensors the team built ended up being a lot more accurate than they predicted, according to Choset. The team has had promising results with its tests.
“Not only are we trying to create a geometric map of the pipe that says, ‘Here’s a tube, there’s a tube, here’s how the tubes connect to the maze,’ so to speak,” Choset said. “We’re also texture mapping what the interior of the pipe looks like onto these maps that we’re creating.”
How the robots repair pipes
While important, mapping is only part of these crawling robots’ capabilities. The CMU team has equipped them with a module that has a spinning nozzle. This nozzle applies resin as a continuous bead that spirals along the pipe wall as the robot inches along.
“Our partners worked with the University of Illinois to develop a resin type of goo or Vaseline-type substance, that you carry with the robot and you deploy it at sites where the pipe is in disarray,” noted Choset. “The goo hardens, and then essentially you have a new pipe inside a pipe.”
Despite the team’s success with this aspect of the project, it has been derailed because the DoE is no longer sponsoring the repair aspect of the work, Choset said. According to him, a change in program management at the DoE has left things uncertain, although its still an important aspect of the work for him.
“What I’m doing is scraping together whatever leftover resources I can find it continue this project,” Choset said. “Not to say it’s my pipe dream, because that would be kind of funny, but this is an important problem. The reality is in 50 years, we’re not going to have pipes.”
In addition, the team is collecting data that it plans to use to build a machine-learning algorithm to be able to assess damage on its own.
“Right now, [the robots] collect visual data, and someone looks at it. What we want to do is help automate that process by cataloging known types of damage, cracks, and rusts, and have the robot automatically flag where they are,” said Choset. “The problem is, with most machine learning algorithms, you need data to train the approach, and we don’t have that data.”
“The data we’re collecting to create these maps is going to serve as the basis for, essentially, higher-level artificial intelligence,” he said. “So not only do we have a pipe network, we have, potentially, a time-varying pipe network. And then we have one where an artificial intelligence can help the inspector look for problems while they’re still small.”
Modularity is a key aspect of CMU system
The Carnegie Mellon team made modularity a priority when building its crawling robot. The drive train, the wheels, the center package, the resin, and the power source can be swapped out if needed.
“Modularity allows us to build customized solutions. In other words, we’ll never be able to figure out what the perfect robot is,” said Choset. “But maybe if we figure out the components, we can arrange and rearrange them, so that we can have that right robot.”
“But there’s an even better reason why you want modularity, and that’s because it expedites development,” he added. “So instead of developing a new system every time, you just develop a module.”
“What we’re modulating will allow the technician to say, ‘You know, I kind of like this, but if this part we’re a little different, it’d be better,’” Choset said. “And we’re going to close the loop with the user and the designer and make what I think would be an optimal solution.”
The CMU team plans to continue developing different models of its robot. Choset said he hopes to bring the technology behind the robot to market later this year with a company he calls JP Robotics.
“I’m interested in robots in general; I like applications for robots in confined spaces, so that’s search and rescue, medicine, inspection of nuclear plans, and now this,” said Choset. “So, to me, they all fall together quite nicely. And then just being able to maneuver, sense, and predict what happens in these tight spaces, I just find it to be a very interesting problem.”
 Learn from Agility Robotics, Amazon, Disney, Teradyne and many more.
Learn from Agility Robotics, Amazon, Disney, Teradyne and many more.




Hi Brianna,
My name is John and I am a American Petroleum Institute 570 Piping Inspector. Coating failure is a primary cause of Piping and equipment deterioration and is a major concern in most industries. This robot could save clients thousands of dollars which in return allow companies the ability to keep individuals working. This is truly a blessing…Thank You.