|
Listen to this article
 |
Unity, a leading platform for creating and operating real-time 3D content, recently announced support for ROS 2 – the open-source robotics middleware suite from Open Robotics. Building on its support of ROS earlier this year, Unity is now supporting ROS 2 due to “significant advancements and support of more hardware drivers, networking modules, communication architecture, and several robot algorithms.”
To showcase the value ROS 2 brings to robotics developers, Unity released a demo of an autonomous mobile robot (AMR) leveraging ROS 2 in Unity.
“ROS 2 has a lot of promising features to serve as a more emphatic tool for robotics software development than its predecessor, ROS 1,” said Dr. Danny Lange, SVP of AI and machine learning, Unity. “The addition of real-time support makes it suitable for time-critical and high-performance systems, including AMRs, which we demonstrate with Unity running a ROS 2 navigation stack. With this pairing of technologies, anyone can explore this scenario, regardless of their level of experience with either ROS or Unity.”
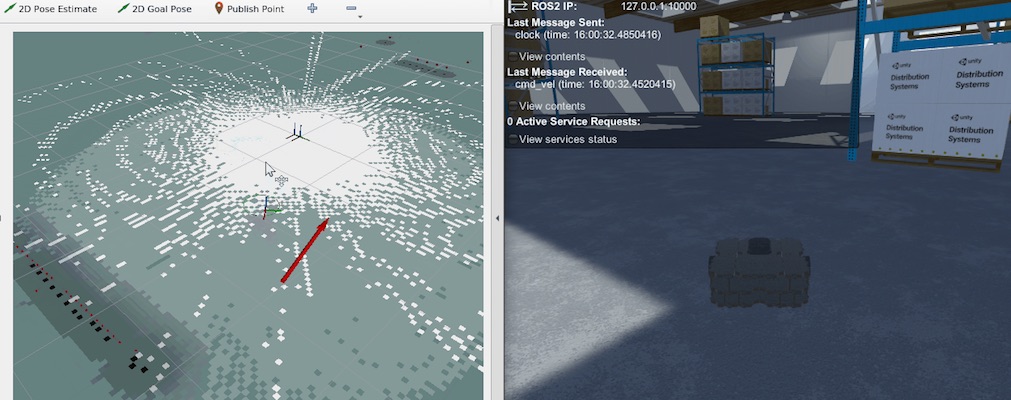
The demo showcases a warehouse environment, a Turtlebot 3 mobile robot with simulated LIDAR and motor controllers, and a Dockerfile to make it easy to build an image containing all of the ROS 2 dependencies necessary to exercise the mapping and navigation stacks against our simulation.
The demo builds off of the previously released Object Pose Estimation demonstration, which combined the power of computer vision and simulation technologies illustrating how Unity’s AI and machine learning capabilities.

“This demo is another powerful example of how we take a flexible framework for writing robot software, and couple it with our robotics packages so that users can more easily create intelligent robots,” added Lange. “We believe that the combination of Unity tools and others open the door for roboticists to safely, cost-effectively, and quickly prototype, develop, test, and deploy solutions.”
Unity said many of the emerging use cases for ROS 2 focus on autonomy. Compared to industrial robots, an autonomous robot’s operating environment is exponentially larger. The permutations of inputs it encounters far surpasses what can be reproduced in a controlled laboratory environment. To fully validate that an autonomous robot behaves the way you expect it to, you can either do it on the robot or via simulation.
“We are excited by the growing ecosystem of ROS 2 compatible simulation tools,” said Katherine Scott, developer advocate, Open Robotics. “Simulation is a critical part of developing robust robot systems and it’s important for developers to be able to choose the right simulator for their application. Unity’s support for ROS 2 is a welcome addition to the growing community of roboticists who are using open source software to accelerate the development of advanced systems.”




Tell Us What You Think!