|
Listen to this article
 |

By Pradeep Deshmane (principal engineer) and Manoj Pujari (lead engineer) at Portescap
Whether moving or positioning objects, accessing dangerous environments, handling hazardous materials like medical waste or simply helping out around the house, there is a tremendous demand for autonomous mobile robots. Not only do they perform tasks that are difficult, repetitive or inconvenient for human labor, they carry them out correctly and are especially effective where precision is required. This article provides an overview of autonomous mobile robots, describing their operation, market need and demand, application requirements, selection criteria, design optimization and future advancements.
Autonomous Mobile Robot Operation and Popular Applications
Autonomous mobile robots navigate on the ground using motorized wheels to propel themselves. Unlike robots that use treads or legs, autonomous mobile robots are easier to design, build and program for movement in flat, not-so-rugged terrain. They are particularly popular in the consumer market because their differential steering is inexpensive and simple to implement. Robots can have any number of wheels, but three wheels are sufficient for static and dynamic balance. Additional wheels can add balance; however, more mechanisms will be required to keep all the wheels on the ground — especially when the terrain is not flat. The motion system consists of motors coupled with gearboxes driving the wheels, which increases the torque capacity for better drivability.
In addition to their widespread use in the consumer market, autonomous mobile robots can be found in hospitals performing infection control, medical services, medical waste delivery, biochemical specimen delivery and general medical tasks. They’re also being deployed in the worldwide fight against the COVID-19 pandemic. Another growing market is in the aerospace and defense (A&D) industry where robots play a crucial role in surveillance and military operations. In the oil and gas (O&G) industry, they are expected to be invaluable tools in pipeline inspections thanks to their ability to photograph the interior of the structures to help identify cracks or faults.
Application Requirements
In most applications, the motion systems typically must satisfy the following requirements:
- Compact size and lightweight
- High torque
- Durability and long life
- Low noise, especially when used in medical and A&D equipment
- High efficiency and low current.
Motion systems in autonomous mobile robots usually consist of brushed or brushless DC motors coupled with compact planetary gearboxes. This requirement may differ slightly from application to application, but the motion systems typically have the following specifications:
- Motor: coreless brushed DC or brushless DC motor
- Gearbox configuration: planetary; ⅔ stage, 30:1 to 120:1 ratio
- Packaging size: <40 mm2
- Gearbox output torque: 4 to 8 Nm
- Gearbox output speed: 50 to 150 rpm

Figure 1. Two common axis configurations for autonomous mobile robots.
Selection Criteria
The first step in selecting a motor and gearbox is to determine both the product’s operating and maximum conditions. Therefore, you will need to confirm the required speed and torque experienced at the wheel output.
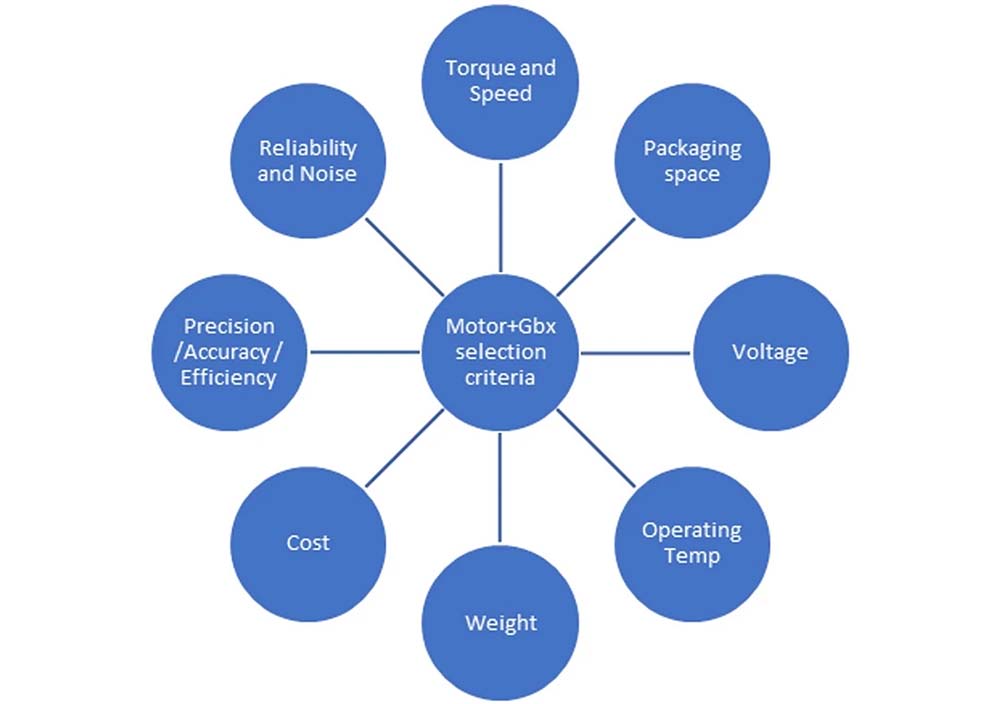
Figure 2. Important aspects to consider when selecting a motor and gearbox for an autonomous mobile robot design.
Torque. First, determine the output torque required and then work backwards to find your motor and gearing. The torque on the wheel should be based on robot acceleration, wheel diameter and carrying capacity. Be sure the carrying capacity accounts for pulling the entire robot in case some actuators fail or wheels slip, as well as the minimum slope and potential obstacles to overcome. Friction and efficiency also should factor into the final torque calculation.
Speed. In order to calculate the speed at which the wheel needs to rotate, you must define your desired speed — or final output — for the wheel. Based on that information, you can choose the motors and gearing. The robot manufacturer generally finalizes the robot’s drive speed, and the wheel diameter determines the required speed at the wheel output.
Packaging space. Make sure the motor stack, which consists of the encoder, brake, motor and gearing, fits into the robot and can be packaged cleanly. The encoder allows you to measure how much the motor shaft turns, and the brake system helps to hold the torque and provide dynamic stopping in case of an emergency.
Voltage. The operating voltage is used to power the motor. Typically, the higher the voltage, the higher the speed capability of the motor. The motor’s datasheet will provide the voltage constant — also known as back EMF constant — so you can calculate how fast the motor will rotate per volt.
Operating temperature. Although temperature often is not an issue, it is still important to make sure your motor stack does not overheat — particularly if it is enclosed. The gearbox is another area of concern since temperature can affect its lubrication life and performance over time.
Weight. The mass of the load also determines the torque for motor selection. Therefore, you will need to estimate the mass, or know the actual mass, to choose a motor. If you base your design on a mass estimate, we recommend applying a 25 percent safety margin. Refer to the torque constant provided on the motor datasheet to calculate how much torque output you will achieve per amp.
Cost. While building a gearbox from scratch may be less expensive, the time and effort required to design, assemble and test the new gear can make a standard gearbox the more economical option.
Precision, accuracy and efficiency. How much lag can you afford in your gearing? Often, wheel motor robot applications can allow a little less precision and accuracy depending on the terrains and torque profiles involved. And, since not all applications demand high performance characteristics like low noise or vibration, lower precision can be tolerated. However, robotic arms or instruments often need low backlash systems that are more precise and accurate.
Reliability and noise. Most applications require higher reliability, so the motor stack must survive the required working points. Some critical applications like surveillance robots demand both low noise and higher reliability, and the motor and gearbox have to satisfy both criteria.
Choose an Optimal Design
Here’s an example of an autonomous mobile robot application using a motion system designed by Portescap:
- Motor: brushed DC 35 GLT
- Main gearbox: planetary gearbox, 3 stage, spur, 99.8 total gearbox ratio
Many autonomous mobile robots employ differential steering, which relies on separately driven wheels for movement. Another design, a four-wheel drive robot with two pairs of powered wheels, offers more balance since each pair can turn in the same direction. However, if the pairs do not run at the same speed, the robot will move slowly and cannot drive in a straight line. An optimum design has a differential steering mechanism similar to those used in a car, which allows the robot to turn left or right, requiring only one motor. Another common configuration of robots uses motors that drive wheels independently instead of differential steering. In this case, separate motors are required to drive each wheel. The overall system specifications are:
- Packaging: 32 -mm2 x 115 mm length
- Gearbox output torque capacity: 8 Nm
- Gearbox output speed: 80 rpm
- Life expectancy: 1,000 hours
- Maximum temperature: 125°C
The Portescap product, shown in Figure 3, offers a smaller package, higher torque carrying capacity and higher durability, making them well-suited for a wide range of autonomous robot applications.

Figure 3. Portescap brushed DC 35 GLT motor with gearbox.
Future Advancements in Autonomous Mobile Robots
Autonomous mobile robots are not without drawbacks. For example, they do not navigate well over rocky terrain, sharp declines or areas with low friction. In order for robots to overcome these limitations, driving architectures must be modified to include mechanisms like a differential drive system with tracks, a skid steer four-wheel drive system or two wheels plus passive casters differential drive system. However, these architectures add more complexity and require detailed studies about their cost impacts.
Without a major change in the overall architecture, robot designers must focus their efforts on optimizing the motion system. The following advancements can help improve autonomous mobile robot performance with respect to durability, efficiency and noise reduction:

Figure 4. Needle roller bearing.
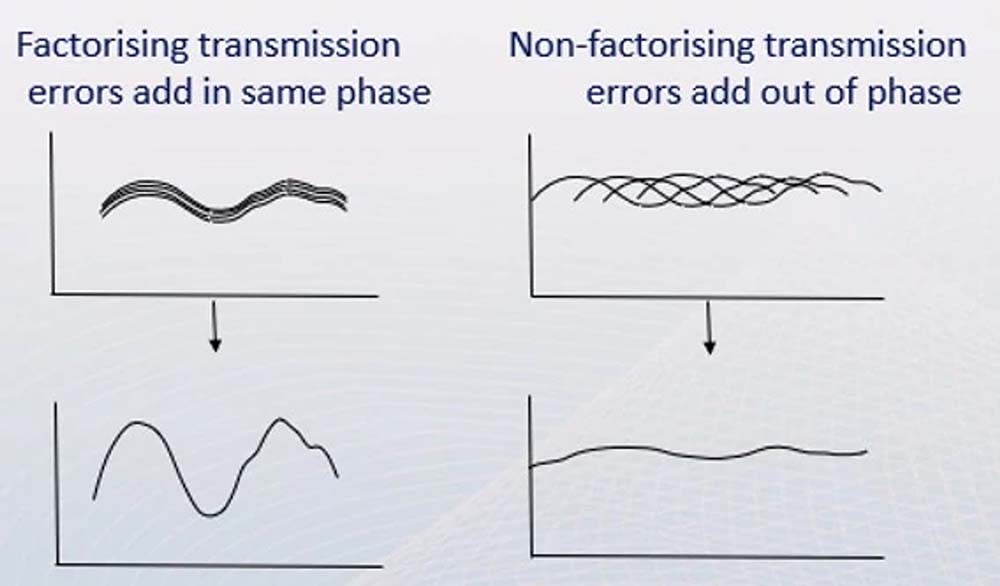
Figure 5. Transition error analysis for low-noise gearbox.
Advanced components. Needle roller bearings, such as the bearing shown in Figure 4, avoid scuffing failures and ensure smooth rotation of planet gears on planet pins. In addition, certain gearboxes feature gear teeth arranged to lower torsional forces for reduced noise.
Advanced FEA-based analyses. A structural analysis helps to identify potential failures and eliminate them early in the design process. An example is shown in Figure 6.

Figure 6. Advanced FEA analysis.
Advanced acoustic simulation. Using software to predict noise, such as the simulation in Figure 7, helps optimize the design for critical applications requiring low noise.
![graph of pressure vs speed [RPM] for a motor](https://mobilerobotguide.com/wp-content/uploads/2021/12/WheeledRobotics-Image-8.jpg)
Figure 7. Advanced acoustic simulation.
Get Rolling With the Right Motor Supplier
As robots become an integral part of our lives in both industry and in our homes, autonomous mobile robots will be at the forefront of the progression. In order to achieve precision and optimal performance for your autonomous mobile robot application, you’ll need the right motion components. Portescap offers a broad range of standard and custom miniature motors with high torque density, reliability and efficiency along with engineering support to ensure your autonomous mobile robotic systems can go where they’re needed and get the job done.
For more information, visit our website.




Tell Us What You Think!