|
Listen to this article
 |

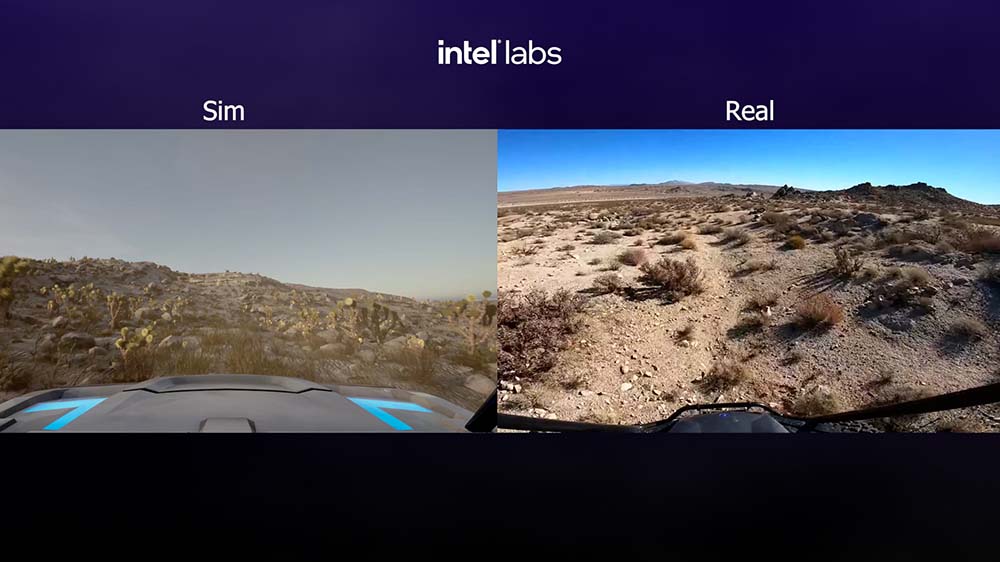
The INTEL race sim software enables quicker modeling of off road worlds for the subsequent testing of autonomous off-road vehicles. | Credit: INTEL
The Defense Advanced Research Projects Agency (DARPA) intends to continue the innovation of autonomous off-road vehicles (AKA unmanned guided vehicles). To support this goal, DARPA recently awarded Intel Federal LLC with support from Intel Labs and its collaborators, the Computer Vision Center Barcelona, Spain, and the University of Texas at Austin, the opportunity to develop advanced simulation solutions for off-road autonomous ground vehicles.
The new Robotic Autonomy in Complex Environments with Resiliency – Simulation (RACER-Sim) program aims to create the next generation of off-road simulation platforms to significantly reduce the development cost and bridge the gap between simulation and the real world.
“Intel Labs has already made progress in advancing autonomous vehicle simulation through several projects, including the CARLA simulator, and we’re proud to participate in RACER-Sim to continue contributing to the next frontier of off-road robotics and autonomous vehicles. We brought together a team of renowned experts from the Computer Vision Center and UT Austin with the goal of creating a versatile and open platform to accelerate progress in off-road ground robots for all types of environments and conditions.” , said German Ros, Autonomous Agents Lab director at Intel Labs.
The goal of RACER-Sim is to provide high fidelity virtual worlds in which to develop and test autonomous off-road vehicles. | Credit: INTEL
Developing off-road autonomous driving vehicles is difficult in part because of the costs to build and test the physical vehicles. And the gap between on-road and off-road deployment is still very significant.
While there are many options for robotic simulation and driving simulation today, few of them are optimized specifically for off-road driving. The original DARPA Grand Challenge was first run in 2004, and subsequent events have helped to push the envelope in autonomous driving algorithms and technology. But these events were all physical competitions.
The goal of this new project is to create simulation environments with the appropriate fidelity to enable lower cost development of new algorithms, new sensor packages and new systems for autonomous off-road driving.
There are substantial challenges for off-road driving that differ from on-road autonomous driving. This includes a lack of road networks and extreme terrain with rocks and all types of vegetation, among many others. Such extreme conditions make developing and testing expensive and slow.
The RACER-Sim program aims to solve this problem by providing advanced simulation technologies to develop and test solutions, reducing deployment time and validation of AI-powered autonomous systems.
The RACER-Sim project includes two phases over 48 months with the aim of accelerating the entire research and development process for designing off-road autonomous ground vehicles. In phase one, Intel’s focus is to create new simulation platforms and map generation tools that mimic complex off-road environments with the highest accuracy (e.g., physics, sensor modeling, terrain complexity, etc.), at scales never seen before.
Creating simulation environments at scale is a process that traditionally requires significant resources and is one of the biggest challenges in simulation workflows. Intel Labs’ simulation platform will enable customization of future maps, including the creation of massive new environments covering more than 100,000 square miles with just a few clicks.
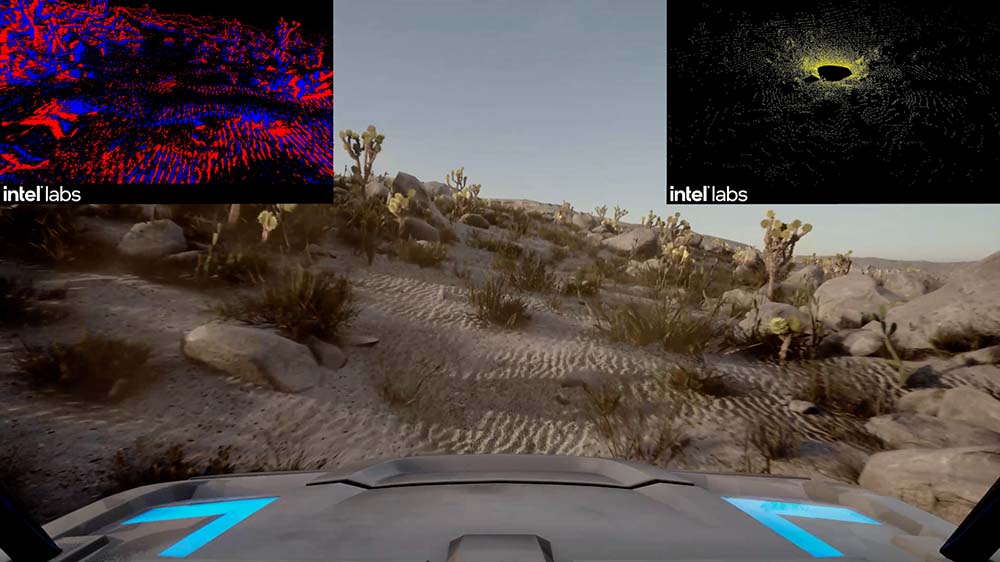
The Intel based simulations include simulated sensor data to enable testing of sensor fusion algorithms and control architectures in a virtual world. | Credit: INTEL
During phase two, Intel Labs will work with RACER collaborators to accelerate the research and development process by implementing new algorithms without the use of a physical robot. Then, teams will validate the performance of the robot in simulation, saving significant time and resources.
Phase two will also include the development of new sim2real techniques – the concept of training the robot in simulation to acquire skills and then transferring these skills to a corresponding real robotic system – enabling the training of off-road autonomous ground vehicles directly in simulation.
Intel expects these new simulation tools to significantly improve the development of autonomous systems using virtual testing, which reduces the risks, costs, and delays associated with traditional testing and verification protocols. In the future, the simulation platform will go beyond validation to create AI models ready for implementation in the real world.








Tell Us What You Think!