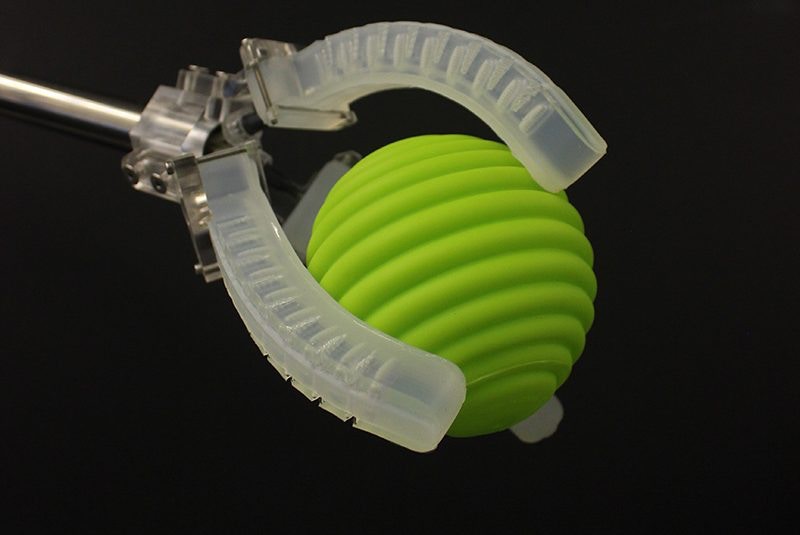
This soft robotic gripper is the result of a platform technology developed by Harvard researchers to create soft robots with embedded sensors that can sense inputs as diverse as movement, pressure, touch, and temperature. (Credit: Ryan L. Truby/Harvard University)
One of the major challenges in the robotics industry is creating robots that are inspired by nature. This is no easy task, of course, and many of the major challenges associate with creating bio-inspired robots haven’t changed in years.
Materials that couple sensing, actuation, computation, and communication must be developed before bio-inspired robots take off. And researchers from Harvard’s Wyss Institute for Biologically Inspired Engineering and the Harvard John A. Paulson School of Engineering and Applied Sciences are doing just that.
The researchers developed a platform for 3D printing soft robots that feature embedded sensors to feel movement, pressure, touch, and temperature. This could be used for integrated sensing across a range of soft robotic applications, including robot-assisted surgery and robotic picking. The platform relies on an established 3D printing technique, known as embedded 3D printing, that allows seamlessly integrates multiple features and materials within a single soft body.
But the key to the new process is an organic ionic liquid-based conductive ink the researchers developed. This ink can be 3D printed within the soft elastomer matrices that many soft robots are made of. Embedding sensors into soft robots has been difficult in part because most sensors are rigid, the team said.
“To date, most integrated sensor/actuator systems used in soft robotics have been quite rudimentary,” said Michael Wehner, former Postdoctoral Fellow at SEAS and co-author of the paper. “By directly printing ionic liquid sensors within these soft systems, we open new avenues to device design and fabrication that will ultimately allow true closed loop control of soft robots.”
To test these new sensors, the team printed a three-fingered, soft robotic gripper. The researchers tested the gripper’s ability to sense inflation pressure, curvature, contact, and temperature. They embedded multiple contact sensors, so the gripper could sense light and deep touches.
“Soft robotics are typically limited by conventional molding techniques that constrain geometry choices, or, in the case of commercial 3D printing, material selection that hampers design choices,” said Robert Wood, Ph.D., Core Faculty Member of the Wyss Institute and the Charles River Professor of Engineering and Applied Sciences at SEAS, and co-author of the paper. “The techniques developed in the Lewis Lab have the opportunity to revolutionize how robots are created — moving away from sequential processes and creating complex and monolithic robots with embedded sensors and actuators.”
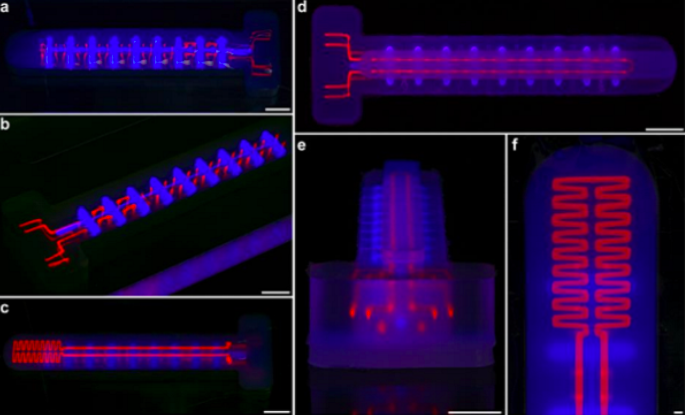
Researchers used multilateral, embedded 3D printing to integrate conductive ionic ink into the body of the actuator.
The next step for the researchers is to use machine learning to train the soft robotic grippers to grasp objects of varying size, shape, surface texture, and temperature.
The researchers published a paper on their work, titled “Soft Somatosensitive Actuators via Embedded 3D Printing,” in the journal Advanced Materials. Here’s the abstract from the paper:
“Humans possess manual dexterity, motor skills, and other physical abilities that rely on feedback provided by the somatosensory system. Herein, a method is reported for creating soft somatosensitive actuators (SSAs) via embedded 3D printing, which are innervated with multiple conductive features that simultaneously enable haptic, proprioceptive, and thermoceptive sensing. This novel manufacturing approach enables the seamless integration of multiple ionically conductive and fluidic features within elastomeric matrices to produce SSAs with the desired bioinspired sensing and actuation capabilities. Each printed sensor is composed of an ionically conductive gel that exhibits both long-term stability and hysteresis-free performance. As an exemplar, multiple SSAs are combined into a soft robotic gripper that provides proprioceptive and haptic feedback via embedded curvature, inflation, and contact sensors, including deep and fine touch contact sensors. The multimaterial manufacturing platform enables complex sensing motifs to be easily integrated into soft actuating systems, which is a necessary step toward closed-loop feedback control of soft robots, machines, and haptic devices.”




Tell Us What You Think!