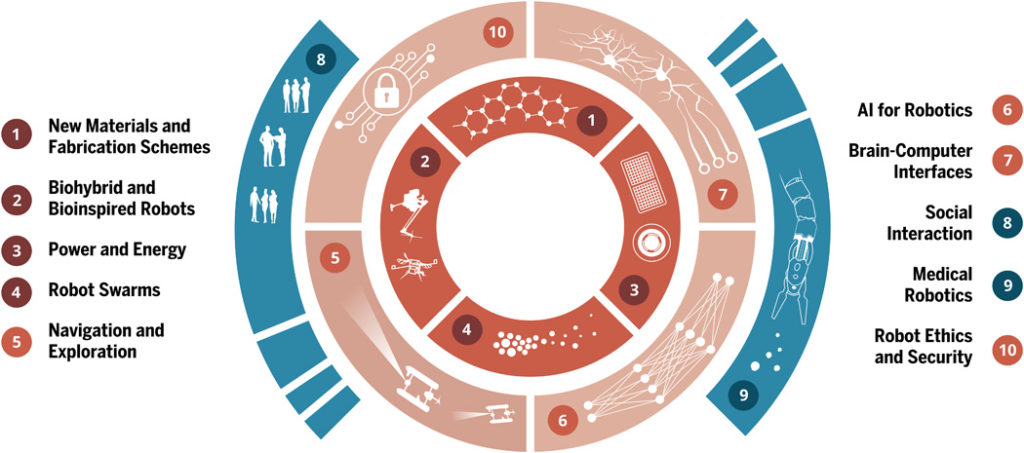
The 10 biggest challenges in robotics that may have breakthroughs in 5-10 years. (Credit: Science Robotics)
The journal Science Robotics ran a survey about the challenges in robotics. An invited panel of experts then sifted through the responses to come up with 10 biggest challenges that might have major breakthroughs in the next 5-10 years. Guang-Zhong Yang, director of the Hamlyn Centre for Robotic Surgery at Imperial College London, led the panel.
The robotics industry has many challenges, and this list admittedly isn’t exhaustive. Most of the challenges surround enabling technologies such as artificial intelligence (AI), perception, power sources, etc. Of course, ethics also made the list.
Here are each of the 10 biggest challenges facing the robotics industry, according to Science Robotics, and what is being done to solve them. Do you agree with these 10 challenges? What issues would you have included on the list? Let us know your thoughts in the comments.
1. New materials, fabrication methods
Gears, motors, and actuators are fundamental to today’s robots. But tremendous work is already being done with artificial muscles, soft robotics, and assembly strategies that will help develop the next generation of autonomous robots that are multifunctional and power-efficient.
2. Creating bio-inspired robots
Robots inspired by nature are becoming more common in robotics labs. The main idea is to create robots that perform more like the efficient systems found in nature. But the study says the major challenges involved with this area have remained largely unchanged for 30 years – a battery to match metabolic conversion, muscle-like actuators, self-healing material, autonomy in any environment, human-like perception, and computation and reasoning.
Materials that couple sensing, actuation, computation, and communication must be developed and shared before this segment takes off. These advances could lead to robots with features such as body support, weight reduction, impact protection, morphological computation, and mobility.
3. Better power sources
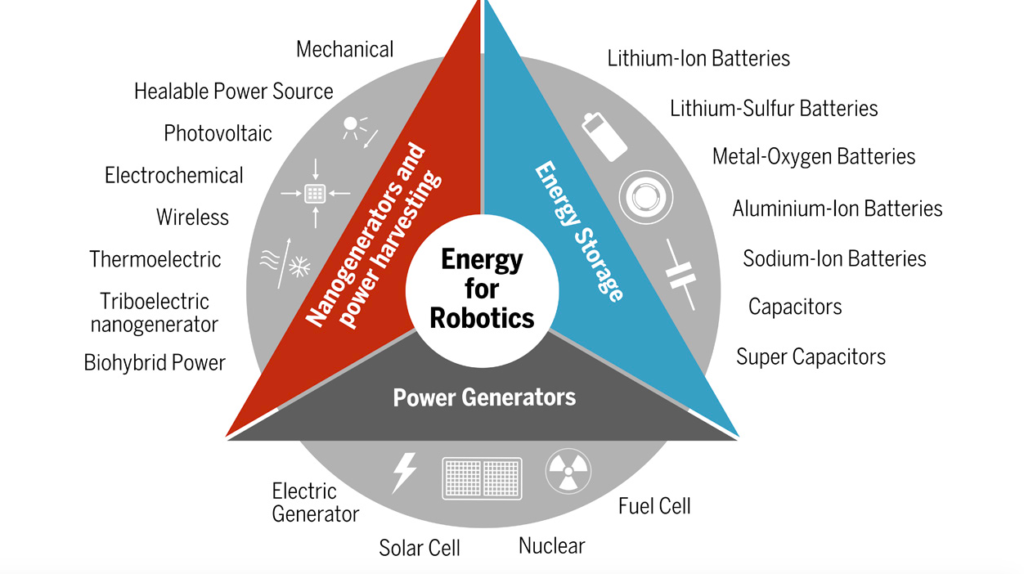
Robots, typically, are energy-inefficient. Improving the battery life is a major issue, especially for drones and mobile robots. Thankfully, increased adoption of these systems is leading to new battery technologies that are affordable, safe and longer-lasting.
Work is certainly being done to make the components of a robot more power efficient. But the study mentions robots that need to operate wirelessly in unstructured environments will eventually extract energy from light, vibrations, and mechanical movement.
Research is also being done to improve battery technology beyond the nickel-metal hydride and lithium ion options currently available.
4. Communication in robot swarms
Robot swarms are tricky because they need to sense not only the environment, but also each robot in the swarm. They need to communicate with the other robots, too, while acting independently.
Engineering the Future of Robotics
Many of these major challenges in robotics will be discussed at our Robotics Summit and Showcase, taking place May 23-24 2018 in Boston. Register by April 20 and save 20% with early bird registration. Learn from and network with the best minds in robotics and unlock the keys to developing next-gen commercial robotics systems.
Agenda | Keynotes | Speakers | Sponsors | Register
![]()
Perception-action loops are fundamental to creating autonomous robots that function in unstructured environments. Robot swarms require their communication ability to be embedded in this feedback loop. Thus, perception-action-communication loops are key to designing robot swarms. There are currently no systematic approaches for doing this across large groups.
The study says, however, falling prices and increasing performances of sensors, processors, storage devices and communications hardware will lead to significant advances of robot swarms in the next 5-10 years.
5. Navigating unmapped environments
There has been significant progress made when it comes to robots perceiving and navigating their environments. Just look at self-driving cars, for example. Mapping and navigation techniques will continue to evolve, but future robots need to be able to operate in environments that are unmapped and poorly understood.
Some of the improvement that need to be made include:
- How to learn, forget, and associate memories of scenes both qualitatively and semantically
- How to surpass purely geometric maps to have semantic understanding of the scene
- How to reason about new concepts and their semantic representations and discover new objects or classes in the environment through learning and active interactions
“For navigation, the grand challenge is to handle failures and being able to adapt, learn, and recover. For exploration, it is developing the innate abilities to make and recognize new discoveries,” the study says. “From a system perspective, this requires the physical robustness to withstand harsh, changeable environments, rough handling, and complex manipulation. The robots need to have significant levels of autonomy leading to complex self-monitoring, self-reconfiguration, and repair such that there is no single point of complete failure but rather graceful system degradation. When possible, solutions need to involve control of multiple heterogeneous robots; adaptively coordinate, interface, and use multiple assets; and share information from multiple data sources of variable reliability and accuracy.”
6. AI that can reason
The study calls AI the “underpinning technology for robotics,” but acknowledges that “we still have a long way to go to replicate and exceed all the facets of intelligence that we see in humans.” The key is to combine advanced pattern recognition and model-based reasoning to develop AI that can reason and has common sense.
AI that can learn complex tasks on its own with minimal training data is also critical. The study does mention that DeepMind’s AlphaGo Zero system is a good example of this, but it says “we do not yet have systems that can do this easily across heterogeneous tasks and domains.”
7. Brain-computer interfaces
Brain-computer interfaces (BCIs) enable some device and machines to be controlled by your mind. BCIs could be quite useful in augmenting human abilities in the future, but developing the technology for wider adoption is the challenge.
The equipment for sensing brain signals is expensive and cumbersome, and the data processing can be tricky. There’s also a long period of training, calibration and learning.
But this is certainly an exciting area to watch. Johnny Matheny, who lost his arm to cancer in 2005, is the first person to live with an advanced mind-controlled robotic arm. In December 2017, researchers from Johns Hopkins Applied Physics Lab delivered the arm to Matheny at his home in Port Richey, Florida. Johns Hopkins has received more than $120 million from the US Defense Department to help pay for the arm’s development over the past 10 years.
8. Social robots for long-term engagement
Humans are, generally, adept at interpreting social behavior. Robots are not. The study says the three biggest challenges of building social robots that truly interact with humans are modeling social dynamics, learning social and moral norms, and building a robotic theory of mind
Today’s social robots have been designed for short interactions, which isn’t how human relationships work. Social robots must expand from moment-to-moment engagements to long-term relationships.
9. Medical robotics with more autonomy
From minimally invasive surgery, hospital optimization, to emergency response, prosthetics, and home assistance, medical robotics represents one of the fastest growing sectors. But the challenge is building reliable systems with greater levels of autonomy.
A long-term challenge is to enable one surgeon to supervise a set of robots that can perform routine procedure steps autonomously and only call on surgeons during critical, patient-specific steps. The study says, “Perhaps the most significant challenge of automating any clinical task is to be able to anticipate, detect, and respond to all possible failure modes. Medical device regulation of autonomous robots will likely need to develop in a manner that balances the requirements for provably safe algorithms with compliance costs.”
10. Ethics
Stop me if you’ve heard concerns about robot ethics before. All kidding aside, it’s a major challenge, and the robotics industry is well aware of. The study breaks down ethical problems into five topics:
- Sensitive tasks that should require human supervision could be delegated entirely to robots
- Humans will no longer take responsibility for failures
- Unemployment and de-skilling of the workforce
- AI could erode human freedom
- Using AI in unethical ways




Great article. Seems like advances in controls and servo tuning are often overlooked. Complex robotic manipulators are never easy to tune due to the complex dynamics with inertia and natural frequencies changing with position and and large ranging payloads. I believe that AI methods will need to be created and improved to simplify this process and to deal with changes that result of mechanical wear over time if we can ever expect to see wide spread reliable use of robots everywhere.
WOW! That is a comprehensive impressive article. I am a FIRST Lego League robotics coach and a robotics club leader. It provides me with valuable information to share and to encourage my young engineers who are age 9 to age 14. Thanks again.
I would add “Multi-Purpose End-Effectors” including “Advanced Tactile Sensing”. For many gripping and manipulation tasks, “hard” programming, complex, multimodal sensing and cognitive techniques could be replaced with decision making based on real-time sensory input (tactile), making the applications more intelligent without complex ‘learning’ and allowing them to approximate the actions of humans (high degree of fine manipulation and dexterity).
Regarding ‘Ethics’ as a top 10 challenge… ehh… not so much.
The secret is developing an AI through a joint task force.Maybe it’s time all techgiants to come together and make this a possibility.
A general consortium of “robotics experts” have different interests depending on what they are working on. Self-driving car software, AI, medical, and the creation of humanoids have very different requirements.
Here’s my quick list of top 10 challenges for a new wave of industrial robotics:
1 Motors: Most motors are high speed and low torque and robots need low speed and high torque output.
2 UX: The future industrial robots that are viable for unstructured environments will have a person operating it as a tool. Is it possible to apply trainable AI to create a gradually easier and intuitive UX? People (without technology backgrounds) must be able to be trained quickly in supervising these machines.
3 Low-cost 3D Cameras: 3D is needed for localization and grasp planning.
4 Point-Cloud Data Interoperability between Different 3D Cameras: It would be nice to have point cloud fusion across different sensors because short-range and long-range cameras require different optics.
5 Grasping: Object surface detection with 3D cameras and motion planning is essential for grasping different types of objects.
6 Grippers: The gripper problem isn’t solved, but that’s because the physics of a single gripper doesn’t handle a wide range of objects very well (small grippers for small objects, large grippers for large objects, payload capacity, etc…)
7 Exception Handling: What happens when the robot makes a mistake? Does it puncture a hole in the workspace? Does an operator manually restart it while a digital management system records the error so the whole system recovers? This needs to be thought out
8 WiFi: WiFi works terribly in large/crowded spaces and places with metal racking.
9 Security & Hackability: IT teams from many large companies do not want to risk having an asset on an open network that could be accessed by an outside entity.
10 Sensors (& Data): A robot’s window to the world is only as good as its data input from sensors. All sensors need to have clean data that minimizes latency and power requirements for data processing.
Thanks Erin for the focus on the challenges within the industrial robotics segment of the robotics industry. Other than your #2 comment, you didn’t reference the introduction of co-bots in the industrial space. Certainly these new cobots pose some additional challenges?
Frank
Hi Frank,
Its an amazing area in robotics that you have highlighted about. In my knowledge about the cobots, there is a very high level of challenge involved for the implementation of same in Industrial areas. That is the reason, it is very important to focus on collaborative applications when talking about collaborative robots because it directly deals with the human safety.
But at the same time, there has been several advancements in this field using the tactile sensors which has improvised the application using the cobots, and still the research is on.
The 10 challenges listed by Erin are the real practical challenges that are already being faced in several major manufacturing lines. However, I would love to know more from Erin as well on her insights on cobots and their challenges.
One more challenge is creating the awareness or educating the people on robotics. This will help to form a readily available workforce to directly work on robotic domain.
This is possible by deeply penetrating robotics into educational stream as it is done with computer science.
This is a major challenge, especially when it comes to integrating robotics into the educational stream. Outside of college/universities, I haven’t seen much work being done there to formerly integrate robotics into any curriculum.
Into the age of humanoid now, it is about time. Guys!!
I wonder any possible project in building serving robots for paraplegic patients. Or robot servant for severely immobile patients!!
( there will be a great needs for this kind of robots)
One of the limitations of most currently available robots is that they are limited in the types of terrain they can cover.
What are the solution to areas of AI that have network challenges?