Credit: Wyss Institute at Harvard University
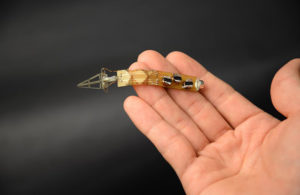
An origami-inspired folding robot developed by Harvard researchers uses an external magnetic field for power, giving it potential for application in medical, industrial or consumer robots.
Originally reported in Science Robotics and created by a team at the Wyss Institute for Biologically Inspired Engineering and the John A. Paulson School of Engineering and Applied Sciences, the arm consists of multiple joints, a gripper and actuators and is capable of complex, repeatable movements at the millimeter to centimeter level.
“Not only are our robots’ folding motions repeatable, we can control when and where they happen, which enables more complex movements,” lead author Dr. Mustafa Boyvat said in a statement.
An external coil with its own power source controls the arm using a low-frequency magnetic field, which creates an electrical current that heats the actuator wires causing them to contract and bend the arm. The bending and straightening of the arm then depends on the frequency of the magnetic field, allowing the arm to carry out specific actions. By using a coil power source and magnetic field, the researchers eliminated the need for batteries and wires to give the robotic arm functionality.
“Like origami, one of the main points of our design is simplicity,” co-author Dr. Je-sung Koh said. “This system requires only basic, passive electronic components on the robot to deliver an electric current – the structure of the robot itself takes care of the rest.”
A micro-robot of this design could in the future be used during surgeries for small tasks like holding tissue and filming inside the body, though its power would come from an outside coil.
“Medical devices today are commonly limited by the size of the batteries that power them, whereas these remotely powered origami robots can break through that size barrier and potentially offer entirely new, minimally invasive approaches for medicine and surgery in the future,” Wyss founding director Donald Ingber said in the statement.
The researchers, however, demonstrated two sizes of the device. A larger arm and coil power source could support wireless, battery-free communication between “smart” objects in a home or industry setting.




ozumba Christopher
How small is it battery, and how far can it be enhanced too, can it be wireless control even how small it is like a nano boat