The second phase of the DARPA Subterranean Challenge concluded late last week with the completion of the Urban Circuit, held at an unfinished nuclear power plant in Elma, Wash. Similar to the challenge’s first phase, the urban circuit challenged teams to use robots and drones to rapidly map, navigate and search underground environments.
Team CoSTAR (Collaborative SubTerranean Autonomous Resilient Robots) landed in the top spot of the Urban Circuit of the DARPA Subterranean Challenge, scoring 16 points to beat nine other teams in the systems competition.

Team CoSTAR, winners of the Urban Circuit phase of the DARPA Subterranean Challenge. Source: DARPA
Team CoSTAR, which finished second in the challenge’s Tunnel Circuit, consists of members from NASA’s Jet Propulsion Laboratory, the California Institute of Technology, Massachusetts Institute of Technology, KAIST of South Korea, and Lulea University of Technology in Sweden.
Team Explorer, made up of members from Pittsburgh’s Carnegie Mellon University and Oregon State University, finished second in the Urban Circuit with 11 points. The team was the first-place finisher in last August’s Tunnel Circuit.
In the virtual competition, Team BARCS scored 150 points to take the top spot, followed by Coordinated Robotics with 115 points.
Because Team CoSTAR and Team Explorer are funded by DARPA, the $500,000 prize for the Urban Circuit went to self-funded team CTU-CRAS-NORLAB, which earned 10 points in the event. This follows another $200,000 the team earned as the self-funded winner of the Tunnel Circuit, held in August 2019. The self-funded team winner in the virtual competition was Coordinated Robotics, which also won prize money in the Tunnel Circuit. For its finish in the Urban Circuit, the team took home $250,000.
The Urban Circuit phase was held from Feb. 18-27, with results announced on Feb. 27. Teams from 11 countries participated across he virtual and systems competitions in the Urban Circuit, DARPA said.
“Teams are under tremendous pressure in the SubT Challenge, not just because of the prize money at stake, but because of the significance of winning a DARPA Grand Challenge, events that have a history of jumpstarting innovation,” said Dr. Timothy Chung, program manager for the Subterranean Challenge in DARPA’s Tactical Technology Office. “At the core of the SubT Challenge is the mission to face an unknown environment and respond to changing situations.”
The swapping of first and second place between teams CoSTAR and Explorer should make for an interesting third phase of the challenge – the Cave Circuit, which is scheduled for August 2020. DARPA has not yet announced the location, but said it will name a location about three months ahead of the event. The cave circuit will challenge teams in a natural cave network, with irregular geological structures, with both constrained passages and large caverns. A final event will be held in August 2021, with a “final integrated challenge course pursuing high-risk and high-reward approaches,” with a promised course that incorporates challenges from all three environments.
Vertical issues in Urban Circuit
In the Urban Circuit, teams were challenged differently than in the initial Tunnel Circuit, which was held in an abandoned coal mine outside of Pittsburgh.
“We knew heading into the Urban Circuit that verticality would be one of the significant obstacles,” said Chung. “Teams that traveled between floors, either flying, walking, or rolling, found more artifacts. Teams designed their approaches to tackle uncertainty up front, and then toward the end of the Urban Circuit, we saw them put their platforms out there and take more risks, I look forward to seeing how they adapt for the Cave Circuit.”
In the systems competition, teams completed four total runs – two 60-minute runs on two courses, labeled Alpha and Beta. Each course included 20 “artifacts,” representing items found in an urban underground setting. Teams earned points by accurately identifying artifacts within five meters.
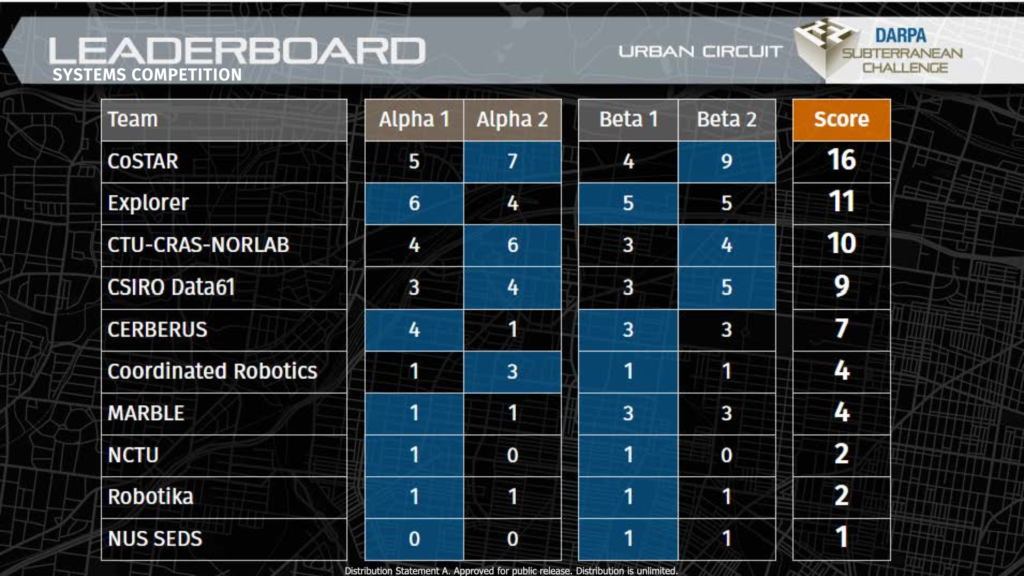
Source: DARPA
In the virtual competition, teams submitted solutions that challenge officials tested across eight courses, designated as “worlds”. Once the teams submitted solutions, they executed autonomously without any input or adjustments from human operators. Like the systems competition, virtual competitors earned points by correctly identifying artifacts within five-meter accuracy.
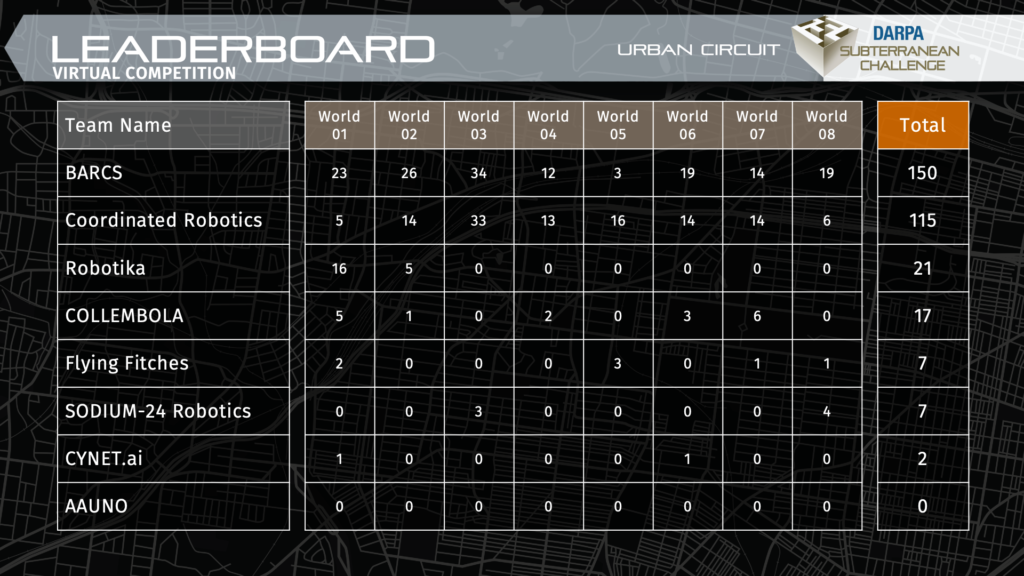
Source: DARPA
There were two ties in the competition in terms of standings, one in each section. In the systems competition, a tie between Coordinated Robotics and MARBLE was broken by using the earliest time the last artifact was successfully reported, averaged across the teams’ best run. For the virtual competition, a tie between Flying Fitches and SODIUM-4 robotics was also broken by the same tiebreaker rule.

Team BARCS, winners of the virtual competition of the Urban Circuit. Source: DARPA
Team BARCS (Bayesian Adaptive Robot Control System) includes members of the Michigan Technological University and Michigan Tech Research Institute. The team views the challenge as “a problem in multi-agent coordination in highly resource-constrained settings. Resources in this case include agent lifespan, sensing ability, communications connectivity, among others. Our solution is inspired by the need to optimize the joint capabilities of the team as well as the utilization of their resources. We are leveraging the mathematical strengths of our team to develop principled, generalizable, and novel solution strategies.”



Tell Us What You Think!