As the National Aeronautics and Space Administration prepares to return to the moon with robotic rovers, researchers are working on ways to keep them rolling in the loose sands and slopes of the lunar surface. Similar techniques for avoiding getting stuck in sand traps could also help with rover missions to explore Mars.
Developers have built a new robot known as the “Mini Rover,” which has appendages that can be lifted and wheels that can wiggle. They have used the rover to test complex locomotion techniques to help it climb hills covered with granular material – and avoid the risk of getting ignominiously stuck on some remote planet or moon.
Rover motions based on terradynamics
Using a complex move the researchers dubbed “rear rotator pedaling,” the robot can climb a slope by using its unique design to combine paddling, walking, and wheel spinning motions. The rover’s behaviors were modeled using a branch of physics known as terradynamics.
“When loose materials flow, that can create problems for robots moving across it,” stated Dan Goldman, the Dunn Family Professor in the School of Physics at the Georgia Institute of Technology. “This rover has enough degrees of freedom that it can get out of jams pretty effectively. By avalanching materials from the front wheels, it creates a localized fluid hill for the back wheels that is not as steep as the real slope. The rover is always self-generating and self-organizing a good hill for itself.”
The research was reported on May 13 as the cover article in the journal Science Robotics. The work was supported by the NASA National Robotics Initiative and the Army Research Office.
A robot built by NASA’s Johnson Space Center pioneered the ability to spin its wheels, sweep the surface with those wheels and lift each of its wheeled appendages where necessary, creating a broad range of potential motions. Using in-house 3D printers, the Georgia Tech researchers collaborated with the Johnson Space Center to re-create those capabilities in a scaled-down vehicle with four wheeled appendages driven by 12 different motors.
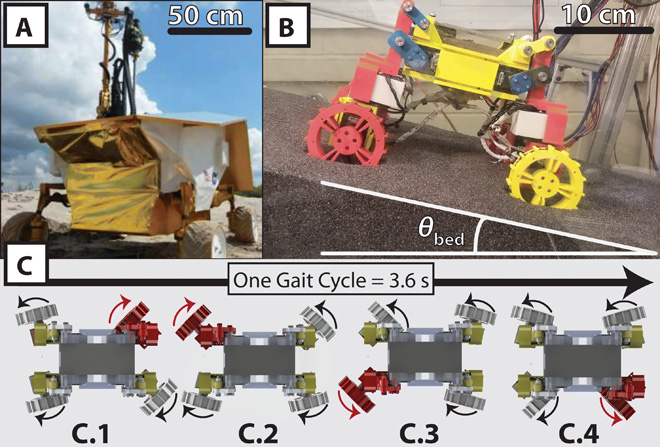
(A) NASA’s RP15 prototype. (B) The Mini Rover resting on a bed of loosely packed poppy seeds on an incline. (C) Four top-view rendered snapshots of the Mini Rover executing a quadrupedal gait. Source: Science Robotics
Modular mechatronic architecture
“The rover was developed with a modular mechatronic architecture, commercially available components, and a minimal number of parts,” said Siddharth Shrivastava, an undergraduate student in Georgia Tech’s George W. Woodruff School of Mechanical Engineering. “This enabled our team to use our robot as a robust laboratory tool and focus our efforts on exploring creative and interesting experiments without worrying about damaging the rover, service downtime, or hitting performance limitations.”
The rover’s broad range of movements gave the research team an opportunity to test many variations that were studied using granular drag force measurements and modified Resistive Force Theory. Shrivastava and School of Physics Ph.D. candidate Andras Karsai began with the gaits explored by the NASA RP15 robot, and were able to experiment with locomotion schemes that could not have been tested on a full-size rover.
Other inexpensive rovers being tested for lunar exploration include Carnegie Mellon University‘s Iris, the NASA Jet Propulsion Laboratory’s (JPL) A-PUFFER rovers, and the participants in the NASA JPL Open-Source Rover Challenge and HeroX’s “Honey, I Shrunk the NASA Payload” competition. The Regolith Advanced Surface Systems Robot, or RASSOR, is another NASA project in preparation for robotic lunar exploration and in-situ resource utilization.
Rover tested for steep slopes
The Georgia Tech researchers also tested their experimental gaits on slopes designed to simulate planetary and lunar hills using a fluidized bed system known as SCATTER (Systematic Creation of Arbitrary Terrain and Testing of Exploratory Robots) that could be tilted to evaluate the role of controlling the granular substrate. Karsai and Shrivastava collaborated with Yasemin Ozkan-Aydin, a postdoctoral research fellow in Goldman’s lab, to study the rover motion in the SCATTER test facility.
“By creating a small robot with capabilities similar to the RP15 rover, we could test the principles of locomoting with various gaits in a controlled laboratory environment,” Karsai said. “In our tests, we primarily varied the gait, the locomotion medium, and the slope the robot had to climb. We quickly iterated over many gait strategies and terrain conditions to examine the phenomena that emerged.”
In the paper, the authors describe a gait that allowed the rover to climb a steep slope with the front wheels stirring up the granular material – poppy seeds for the lab testing – and pushing them back toward the rear wheels. The rear wheels wiggled from side-to-side, lifting and spinning to create a motion that resembles paddling in water. The material pushed to the back wheels effectively changed the slope the rear wheels had to climb, allowing the rover to make steady progress up a hill that might have stopped a simple wheeled robot.
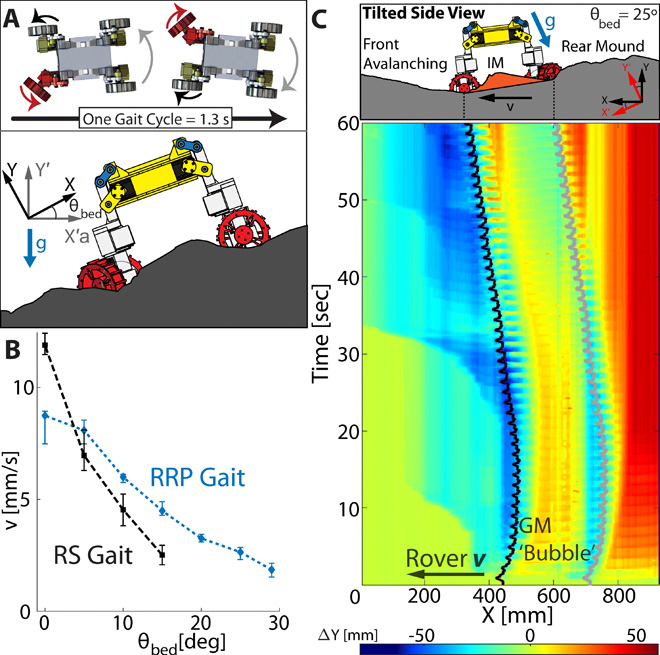
(A) RRP gait wth no modulation, (B) mean velocities going uphill of the RS and RPP gaits, and (C) height difference color map of the GM profiles over times as the Mini Rover executes the RRP gat on a 25-degree granular slope. Source: Science Robotics
The experiments provided a variation on earlier robophysics work in Goldman’s group that involved moving with legs or flippers, which had emphasized disturbing the granular surfaces as little as possible to avoid getting the robot stuck.
“In our previous studies of pure legged robots, modeled on animals, we had kind of figured out that the secret was to not make a mess,” said Goldman. “If you end up making too much of a mess with most robots, you end up just paddling and digging into the granular material. If you want fast locomotion, we found that you should try to keep the material as solid as possible by tweaking the parameters of motion.”
But simple motions had proved problematic for Mars rovers, which got stuck in granular materials. Goldman says the gait discovered by Shrivastava, Karsai and Ozkan-Aydin might be able to help future rovers avoid that fate.
“This combination of lifting and wheeling and paddling, if used properly, provides the ability to maintain some forward progress even if it is slow,” Goldman said. “Through our laboratory experiments, we have shown principles that could lead to improved robustness in planetary exploration – and even in challenging surfaces on our own planet.”
The researchers said they hope next to scale up the unusual gaits to larger robots, and to explore the idea of studying robots and their localized environments together. “We’d like to think about the locomotor and its environment as a single entity,” Goldman said. “There are certainly some interesting granular and soft matter physics issues to explore.”
The researchers also worked with Robert Ambrose and William Bluethmann at NASA and traveled to the Johnson Space Center in Houston to study the full-size NASA RP15 rover.

The Mini Rover during testing. Source: Georgia Tech
Terrestrial applications also possible
Though the Mini Rover was designed to study lunar and planetary exploration, the lessons learned could also be applicable to terrestrial locomotion – an area of interest to the Army Research Laboratory, one of the project’s sponsors.
“This basic research is revealing exciting new approaches for locomotion in complex terrain,” said Dr. Samuel Stanton, program manager at the Army Research Office, an element of the U.S. Army Combat Capabilities Development Command’s Army Research Laboratory. “This could lead to platforms capable of intelligently transitioning between wheeled and legged modes of movement to maintain high operational tempo.”
Another example of how such vehicles can be used is a Medi-Rover robot, which is helping doctors collect swab samples for COVID-19 testing in India.




Tell Us What You Think!