|
Listen to this article
 |
Open Robotics is working with Blue Origin, the sub-orbital spaceflight company founded by Jeff Bezos, and NASA on Space ROS. Space ROS is a version of ROS 2 meant to meet verification and validation requirements aerospace software must meet before being used in a mission.
The Robot Operating System (ROS) been used in space activities for over a decade now. Its use began at ROSCon 2012, where NASA presented its use of ROS in the Robonaut 2 (R2) humanoid robot. NASA switched R2’s software over to ROS and used Gazebo, Open Robotics’ 3D robotics simulator, to build a model of the robot and the International Space Station (ISS).
By 2014, R2, and its ROS-based software, was up and running on the ISS. This was the first confirmed use of ROS in space.
When NASA started working on its next robot, Robonaut 5 (R5), also called Valkyrie, it used ROS from the beginning. It also continued to use Gazebo for testing and development of the robot. R5 later competing in the DARPA Robotics Challenge.
In 2015, NASA held the first Space Robotics Challenge (SRC), a virtual competition to advance robotic software and autonomous capabilities for space exploration missions. For the SRC, teams were challenged to simulate R5 doing habitat preparation tasks. The winner of the competition, Coordinated Robotics, was able to transfer his code from simulation to real robot hardware in one day.
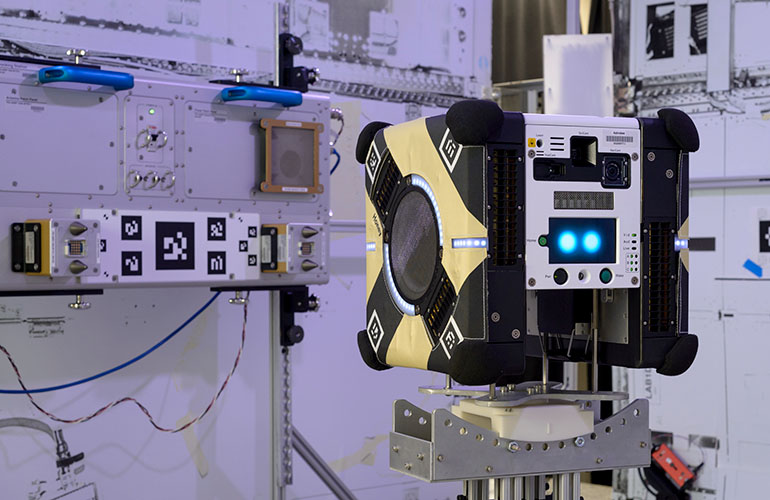
Astrobee aboard the ISS. | Source: NASA
Brian Gerkey, co-founder and CEO of Open Robotics, is keynoting our Robotics Summit & Expo, which takes place May 10-11 in Boston. His talk, called “Robotics Needs a Babelfish: The Skinny on Robot Interoperability,” will discuss how companies are addressing interoperability, and what options are available to vendors, end users, and integrators. Attendees will learn about the history of Open-RMF (Robotics Middleware Framework), best practices for multiple vendor robot interoperability, and future interoperability trends.
NASA uses ROS in other space robots such as Astrobee, the free-flying successor to SPHERES. Multiple Astrobees are at work inside the ISS.
Currently, NASA and Open Robotics are working on the VIPER program. The goal of VIPER is to send a mobile robot to the South Pole of the Moon in 2023. ROS 2 will be in the control loop for the rover.
Blue Origin recently acquired Honeybee Robotics for an undisclosed amount. The deal is expected to close in mid-February, and Honeybee Robotics will become a wholly-owned subsidiary of Blue Origin.




Tell Us What You Think!