
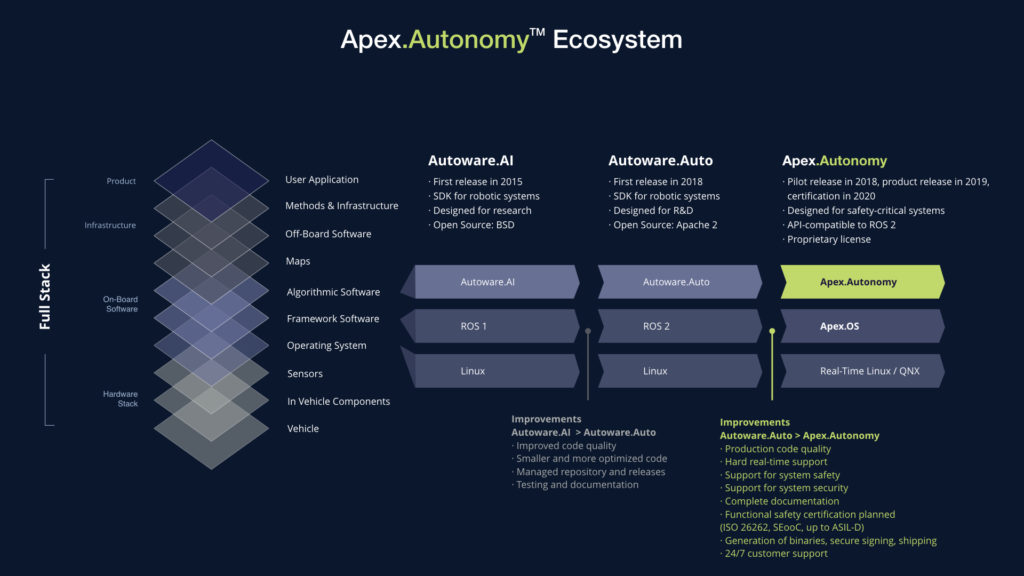
Apex.OS enables autonomous vehicle developers to build on a safe framework based on ROS 2. Source: Apex.AI
Last week, Jan Becker, co-founder and CEO of Apex.AI, announced the availability of Apex.OS 1.0. The framework is based on ROS 2, the open-source Robot Operating System, and it is intended to ease software development for autonomous vehicles.
Becker said in a blog post that he and Dejan Pangercic co-founded Apex.AI in 2017 with the goal of making “mobility safer and more reliable.” As the software stack for robotics and self-driving cars evolves, software engineers will need to simplify and specialize, Becker wrote.
“Apex.OS is a natural choice for automotive companies interested in using modern software practices to implement autonomy,” he stated. “ROS is already the de facto standard for robotics, and Apex.OS extends that standard to the autonomous driving industry. In doing so, Apex.OS offers companies a head start on bringing safety to the autonomous driving software layer, the means to focus their business on their own key differentiators, and much faster time to market.”
“Our core expertise is to apply advanced C++ and modern software architecture to develop a software framework for real-time, deterministic robotic and autonomous system development,” said Pangercic, chief technology officer at the Palo Alto, Calif.-based startup.

Co-founders Jan Becker and Dejan Pangercic. Source: Apex.AI
“In recent years, we’ve seen all manner of robotics companies go to market by leveraging the more than 10 years of software development behind ROS,” added Brian Gerkey, CEO of Open Robotics. “Now Apex.AI is bringing that benefit to the world of autonomous driving. If a transportation company insists on re-inventing the wheel, they can focus on the actual wheel and leave the software to Apex.AI and ROS.”
Apex.OS and automotive applications
According to Becker, customers in North America, Europe, Japan, and Australia are already using Apex.OS to implement applications integrating artificial intelligence. He responded to the following questions from The Robot Report about Apex.OS:
Autonomous mobile robots generally operate in constrained environments at relatively low speeds. How does Apex.OS deal with more dynamic open roads?
Becker: Apex.OS as a software framework is application-agnostic in principle, as it does not contain algorithms or functionality specific to robotics and autonomous driving.
Specific framework requirements are driven by the following:
- the amount of data that passes through the framework
- latency requirements
- algorithmic requirements
- compute platform requirements with respect to chip manufacturers, etc.
These are influenced by factors [such as] the amount of change in the environment of the robot or vehicle. We have more than 20 years of developing automotive automation systems. We have carefully analyzed automotive framework requirements and have designed Apex.OS to meet these requirements.

Source: Apex.AI
Are you working with other software companies on other layers of the autonomous software stack?
Becker: Since Apex.OS is based on the ROS 2 architecture and APIs [application programming interfaces], developers of algorithmic components such as computer vision or motion planning, who are using ROS today, can use Apex.OS in the future to develop their components in a real-time, reliable, and certifiable way. This makes productization much easier and faster for them.
How urgent is cybersecurity for connected vehicles?
Becker: The security of cyber-physical systems such as connected and automated vehicles is very important and needs to start at a system level and then include all aspects and components of the system. We have done a threat analysis of our software and are working with our customers to integrate Apex.OS into their vehicles so that the resulting system is as safe and secure as possible.
Are you already working with the major automotive OEMs? Can you name any of your existing customers?
Becker: Yes, we are. We are not sharing customer names at this time, but we have disclosed strategic investors, which include Toyota AI Ventures, Airbus Ventures, Volvo Group Venture Capital, HELLA Ventures, and Jaguar Land Rover’s InMotion Ventures.
What’s next for Apex.OS? Will you be offering add-ons, or do you expect the developer community to share?
Becker: We are continuing to develop valuable features in Apex.OS based on feedback from our leading automotive users. These will become available through future releases of Apex.OS.
We also continue to give back to the ROS 2 community through open-source contributions and technical leadership. Our customers, who include developers and open-source enthusiasts, are grateful for the health and vitality of an open-source code base along with a thriving commercial ecosystem around it.
ROS will continue to evolve, and Open Robotics and the ROS community will continue to add features to ROS. We are closely collaborating with Open Robotics on getting those features into Apex.OS that are relevant to the automotive community.
Source: Apex.AI
Given the competitiveness of the self-driving car space, what do you offer that will enable rivals to agree on using your layer rather than developing their own?
Becker: Apex.OS is compatible with ROS, and ROS is the de facto development standard. This means that we develop into an open architecture and not into a proprietary architecture.
Every autonomous mobility system deployed into a public environment must be safe. We enable customers to focus on their applications without having to worry about the safety of the underlying components.
Companies will differentiate themselves through performance, discrete features, and other product capabilities. By adopting Apex.OS, we enable them to focus on developing these differentiators.
Do you have ISO 26262 safety rating yet? What’s involved in getting that?
Becker: We are working on ISO 26262 certification and will have an update later this year. We are partnering with the TÜV NORD on our safety certification.




Tell Us What You Think!