Etalex, a Canadian manufacturer of commercial interiors, metal fixtures, shelving, wood furnishings and heavy-duty racking systems, struggled with picking metal parts out of a press brake leading to significant automation problems. Etalex had no room for safety guarding in front of the press and needed a robot that could safely handle pick and place tasks in the high traffic area.
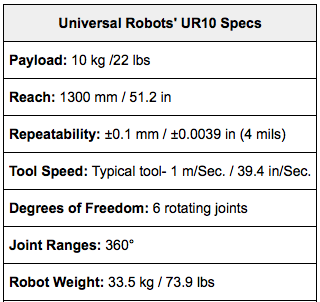
The company adopted the Universal Robots UR10 to fix the problem. Designed specifically for larger tasks, the UR10 is Universal Robots’ largest collaborative industrial robot arm.
Challenge
“We needed a flexible automation solution that could be used for 10 different production cycles. Since I only have 6 feet of space in front of the brake press, it was important that I could run this application without safety caging around it,” said Etalex Operations Manager, Jean Francois Rousseau.
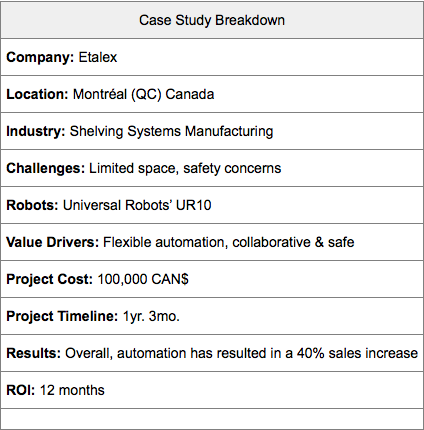 Before the arrival of Etalex’s new robot colleague, an employee would manually unload the press brake eight hours a day. The manual tasks have now been reduced to an hour per day spent on inspecting the quality of each pallet and changing the coils, resulting in an estimated ROI of about 12 months.
Before the arrival of Etalex’s new robot colleague, an employee would manually unload the press brake eight hours a day. The manual tasks have now been reduced to an hour per day spent on inspecting the quality of each pallet and changing the coils, resulting in an estimated ROI of about 12 months.
Etalex Machine operator Richard Clive said the UR10 has made the workplace safer. “Before, you had to put your hands close to the brake press. There’s always a chance of an accident happening at any time. But with the Universal Robots, there is no chance of anyone getting injured.”
[Related: Q&A: Universal Robots co-founder Esben Østergaard]Prior to installing the UR10, Etalex got the approval from the Commission de la santé et de la sécurité du travail du Québec (CSST), which approved the use of collaborative robots at the factory. Even though the risk assessment deemed the robot able to run without safety guarding, Rousseau decided to install a zone sensor that causes the robot to slow down once an unknown object enters its workspace:
“This wasn’t strictly necessary but having the robot slow down to 20% is reassuring for employees just getting used to working with robots unguarded.”
Solution
The 300,000 square foot production hall at Etalex, houses the UR10 right upfront, unloading metal parts into a large press brake. After the press punches holes in the parts, the robot arm’s pneumatic suction cups pick the piece back up and stack them in a patterned pile on a cart. As this happens, employees pass back and forth in front of the robot in the busy hall.
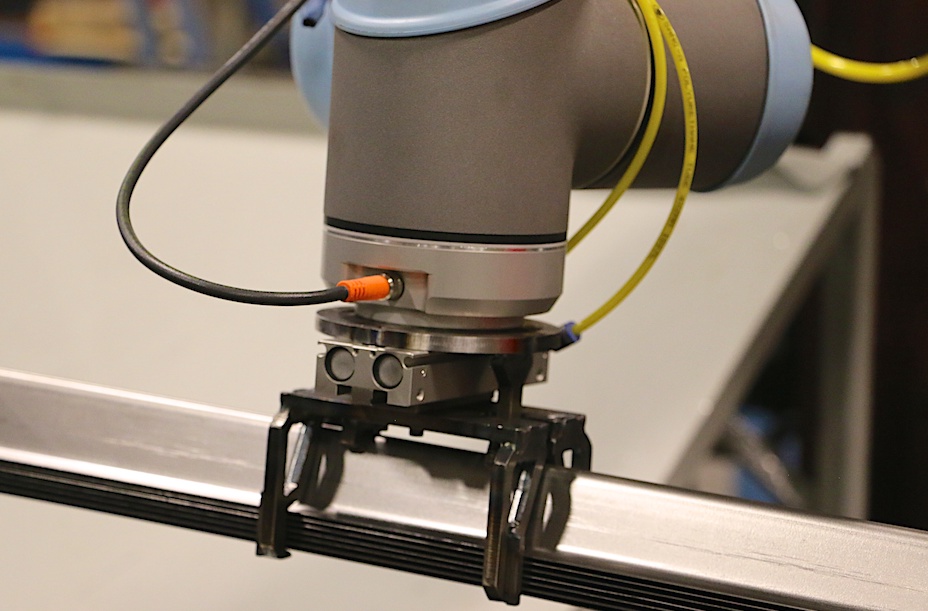
This gripper was created for the UR10 to handle 7 parts in the same cycle instead of one. (Credit: Universal Robots)
Compared to the other 25 robots in operation at Etalex, which are all placed behind safety fencing, the UR10 is an unusual sight. The collaborative robot has built-in force control that limits the force at contact and does not cause bodily harm, enabling them to work right alongside employees. Unlike more traditional industrial robots that normally stay bolted down in one spot, the lightweight UR robots can also quickly be moved and reprogrammed for various production tasks.
Differentiating the UR robot from its caged peers is also the ease of use. Programming happens on a touchscreen tablet where the user simply presses arrow keys to make the robot move to desired positions. Another option is to put the robot in “teach mode,” a feature Etalex programmer Alex Pichette, has used extensively.
 “The teach mode allows you to simply grab the robot arm and show it what moves to perform. Instead of having to go back to a keyboard and enter new data, all programming happens right there on the floor next to the robot. That has saved us a lot of time.”
“The teach mode allows you to simply grab the robot arm and show it what moves to perform. Instead of having to go back to a keyboard and enter new data, all programming happens right there on the floor next to the robot. That has saved us a lot of time.”
Results
Former Etalex Director of Operations Jean Piuze explains that 60% of the company’s cost is the purchase of steel for the metal racks.
“That means that we have to optimize our production significantly to stay competitive and reduce costs. Automating with robots is the only way we can do this,” said Piuze. “As a result, we’ve had a 40% increase in sales, which also means that we did not need to lay people off because of automation. They have now been freed up to perform more challenging tasks than simple pick and place routines.”
Etalex is currently working on new robotic cells with two additional UR10s in palletizing applications: one for galvanized shelving and the other for reinforcement channels for shelving. Originally, Rousseau did not think the UR robots could handle these tasks:
“It required a fast 3-second cycle, but we figured out a way to create a gripper for the UR robot that can handle 7 parts in the same cycle instead of one – which meant that we could easily allow the cycle time to be 20 seconds. Our preference now is to use the UR robots wherever possible.”

Etalex’s Alex Pichette programming a UR robot for a palletizing application. (Credit: Universal Robots)



Tell Us What You Think!