
Researchers are already using generative AI to make robots faster learners, and a summit panel will discuss how this technology can be applied to robotics at scale.
Update on AgTech automation at CNHI

Marc Kermisch from CNHI provides an update on how autonomy and digitization are developing to help automation.
AI job automation will happen gradually, says MIT CSAIL

MIT CSAIL’s research examines the economic practicality of using AI for automating tasks, with a particular emphasis on computer vision.
MIT framework allows robots to learn faster in new environments

MIT researchers developed a framework that helps robots learn faster in new environments without needing a user to have technical knowledge.
MIT uses liquid neural networks to teach drones navigation skills

A team of researchers from MIT CSAIL introduced a method for drones to master vision-based fly-to-target tasks in unfamiliar environments.
How MIT taught a quadruped to play soccer

MIT’s DribbleBot can maneuver soccer balls on landscapes like sand, gravel, mud and snow and get up and recover the ball after falling.
MIT CSAIL creates materials that can sense the way they move
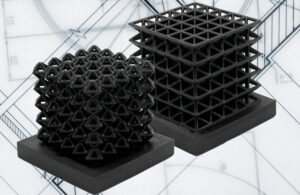
The CSAIL team hopes their technology can be used to create wearable devices that provide feedback on how the user is moving.
MIT CSAIL develops soft, pneumatic actuator
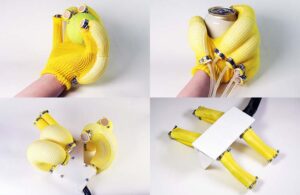
Soft, pneumatic actuators can provide high response rates and power to input ratios, but creating them can be tedious.
Motional, MIT roboticists to examine the future of human-robot collaboration in RoboBusiness Direct

In their RoboBusiness Direct session moderated by MassRobotics Executive Director Tom Ryden, Motional CTO Laura Major and MIT Professor Julie Shah will examine the future of human-robot interaction.