I met Jeremy Fishel, founder of Tangible Research, at CES 2020. Tangible Research is one of three institutions involved in developing a haptic-controlled, humanoid gripping system called the Tactile Telerobot. Interviewing him in his packed booth on the floor of Eureka Park, he introduced me to his colleagues from the Shadow Robot Company, SynTouch and HaptX.
“Shadow Robot Company provides expertise and products for dexterous robotic hands, Tangible Research provides expertise on tactile sensing and haptics, and HaptX provides expertise and products for the haptic gloves,” Fishel said. “The complete system also includes hardware from SynTouch (biomimetic tactile sensors) and Universal Robots (robot arms).” He excitedly referred to the triumvirate as the Converge Robotics Group (CRG).
Together with Rich Walker of Shadow, Fishel received sponsorship from All Nippon Airways (ANA Holdings) as a stepping stone to an eventual Mars landing. In the words of Kevin Kajitani of ANA’s Avatar Division, “We are only beginning to scratch the surface of what is possible with these advanced Avatar systems and through telerobotics in general. In addition to sponsoring the $10M ANA Avatar XPRIZE, we’ve approached our three partner companies to seek solutions that will allow us to develop a high performance, intuitive, general-purpose Avatar hand. We believe that this technology will be key in helping humanity connect across vast distances.”
A recent ANA press release further boasted, “The teleoperation and the telepresence system will feature the first robotic hand to successfully transmit touch sensations. The innovative technology has been called the ‘Holy Grail of robotics’ for its potential to revolutionize the industry, making the upcoming public test a true milestone for ANA’s ventures in robotics.”
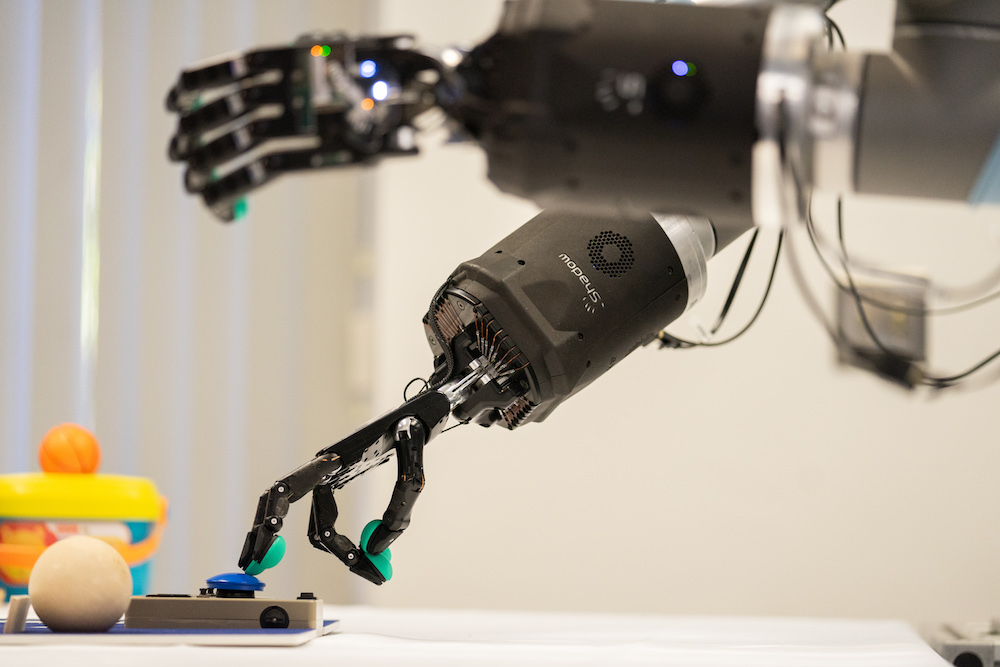
CRG’s technology already displays an “unprecedented precision remote-control” with robotic fingers typing on a keyboard 5,000 miles away from its human operators. Walker predicts that Telerobot eventually will be used in operating the most dangerous human missions. “Our remotely controlled system can help transform work within risky environments such as nuclear decommissioning and we’re already in talks with the UK nuclear establishment regarding the application of this advanced technology.”
Credit: Converge Robotics Group
Fishel confided that the most challenging aspect of this 15-month endeavor is not the technology, but managing all the contributing interests. “No kidding, this takes more time than one might expect. The engineers between companies work well together with almost no issues — we have a lot of brilliant people working on a pretty damn cool project, which checks a lot of boxes for keeping engineers happy (and I like to count myself in that group). However, the business relationships get complicated at times since businesses have their own objectives and needs.”
He continued to describe his diplomatic capabilities. “When conflicts arise, we try to accept our differences and focus on what common goals are bringing us together. This has certainly been a story of a sum being greater than the parts, so I think each partner and collaborator recognizes this is something special that is worth maintaining.” As with any startup these interpersonal skills are invaluable to launching any venture, especially a mechatronics-led startup.
Tactile Telerobot rivals OpenAI Dactyl Hand
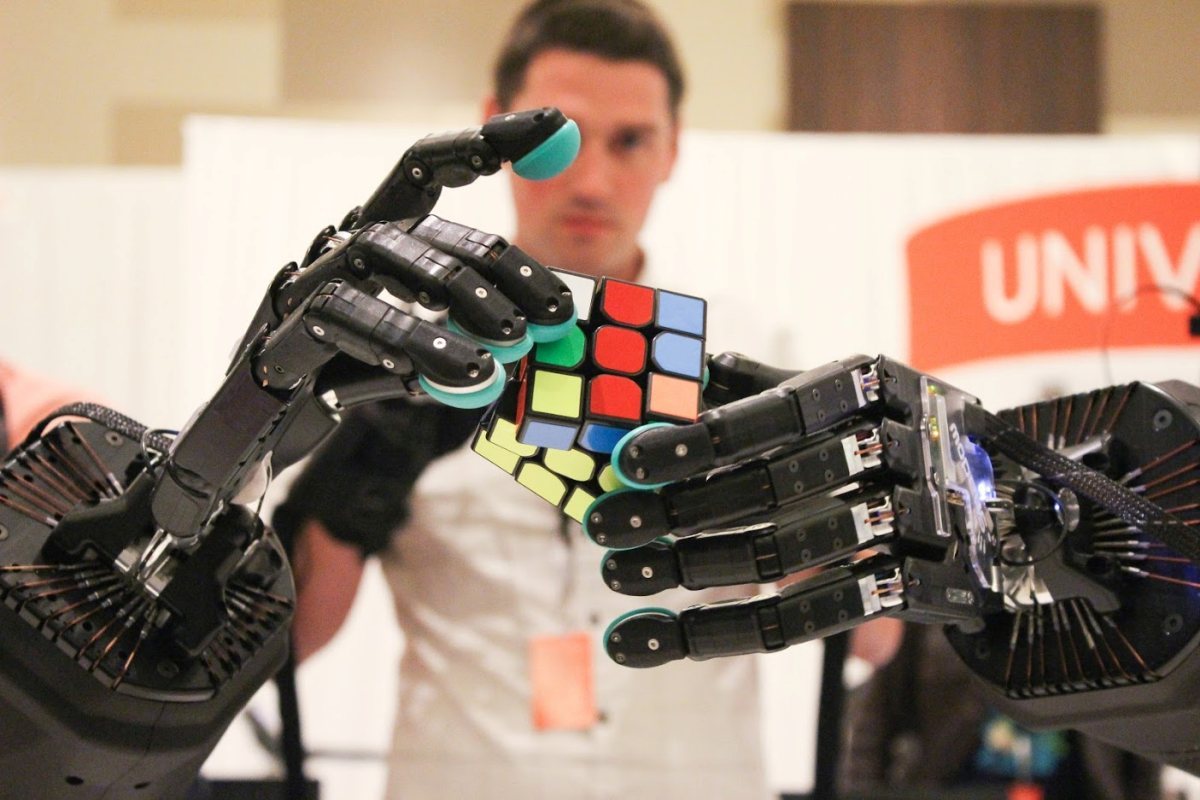
The dexterity of the Tactile Telerobot, which is available to “early access customers,” is rivaled only by OpenAI’s Dactyl Hand, which stunned the robotics world this past October with its agility in solving a Rubik’s cube one-handed. The demonstration promoted the use of artificial intelligence (AI) over mechanics in accomplishing an array of complex problems through software.
As Peter Wilnder of OpenAI explains, “Plenty of robots can solve Rubik’s cubes very fast. The important difference between what they did there and what we’re doing here is that those robots are very purpose-built. Obviously there’s no way you can use the same robot or same approach to perform another task. The robotics team at OpenAI have very different ambitions. We’re trying to build a general purpose robot. Similar to how humans and how our human hands can do a lot of things, not just a specific task, we’re trying to build something that is much more general in its scope.”
The key to Dactyl’s skilled movements is its algorithms and training data to foster general autonomy. Wilder elaborates further, “To train a real world robot, to do anything complex, you need many years of experience. Even for a human, it takes a couple of years, and humans have millions of years of evolution to have the learning capabilities to operate a hand.”
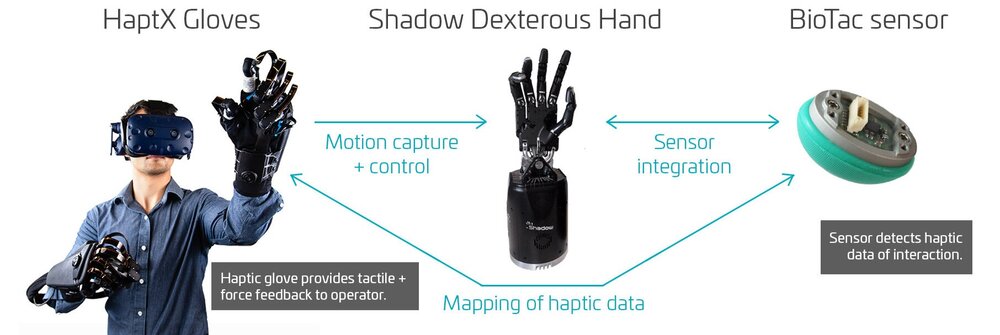
Tactile Telerobot integrates three primary products: Shadow Robot Hands, SynTouch BioTac sensors, and HaptX Gloves. | Credit: Converge Robotics Group
The Great Debate
Speed to market in solving real-world problems is a key differentiator of the approach to the Tactile Telerobot. Rather than relying on deep learning to chip away at specific tasks over decades, the remote haptic controls leverage human nimbleness immediately from distances across the globe.
“Obviously the advantage is the tactile feedback and high dexterity of the system that makes the system really simple and intuitive to use,” explained Fishel. “Although, I wouldn’t call it an unfair advantage, we’ve been saying touch is important in robotics for years. But, it is an observable fact that when you take away the sense of touch from humans, their ability to manipulate dexterously is greatly diminished, so obviously robots that can’t feel aren’t going to be any better. We’ve fixed this with our Tactile Telerobot so this critical tactile and haptic information gets back to the operator.”
He continued to unpack their methodology. “The reason we chose the Tactile Telerobot over an autonomous approach is that human intelligence is still far superior to AI. As Judea Pearl, a pioneer in AI, has rightfully pointed out, until AI learns to properly deal with cause and effect, it is just pattern recognition, which might be impressive in what it can do from a computational standpoint, but isn’t actually intelligent in a general sense.”
When I pressed Fishel on his opinion of OpenAI as a competitor, he retorted, “OpenAI is doing amazing things, we don’t see them as competition, but rather collaborators, especially as we move towards applications where we’re looking for partial or complete autonomy and teaching by demonstration.”
“There is a great debate on whether the human hand is an optimal end effector for everything in our environment, or whether we’ve simply designed everything in our environment to work well with our hands,” said Fishel. “Whichever you subscribe to, the end result is that human hands are a pretty good tool for interacting with the world.”
This beckons the question – who will eventually prevail in arm wrestling: cyborgs or humans?
Credit: Converge Robotics Group



Tell Us What You Think!