|
Listen to this article
 |
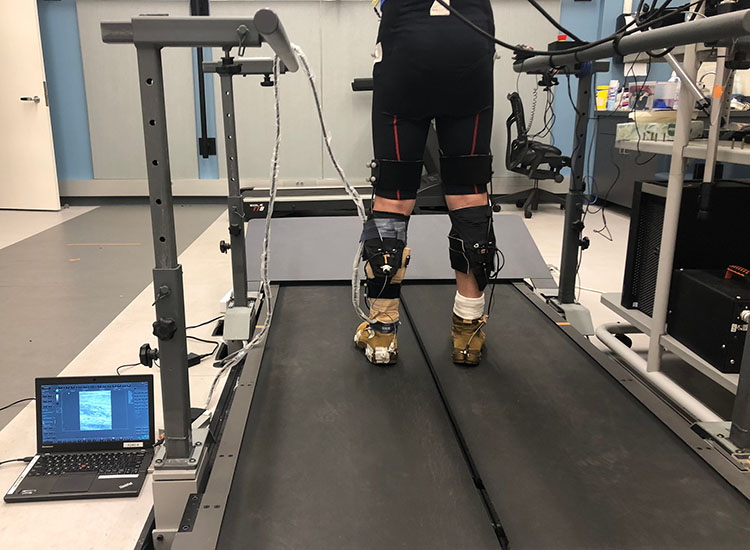
Researchers used a portable ultrasound system strapped to the calves of participants to image their muscles. | Photo Credit: Harvard Biodesign Lab/Harvard SEAS
The way we walk constantly changes. We change speed and adjust to inclines without even thinking about it. This variability is what makes walking difficult to recreate with exoskeletons. But researchers at the Harvard School of Engineering and Applied Sciences (SEAS) have developed an approach that automatically adjusts a soft exoskeleton based on how the wearer is walking.
Typically, customizing exoskeletons to the way someone walks requires hours of manual or automatic tuning. This process can be challenging for a healthy person, and sometimes nearly impossible for older adults or clinical patients.
SEAS researchers are taking a unique approach to developing their exoskeleton. Instead of focusing on the dynamic movements of the limbs of the wearer, they created a muscle-based assistance strategy.
With this strategy, a portable ultrasound system takes ultrasound measurements of the calf muscles. These measurements estimate the amount of force produced by those muscles. Using these measurements, researchers develop a personalized assistance profile. The exosuit then automatically prescribes the amount of assistance needed for different walking speeds and slopes. The exosuit provides lower assistance force to help someone walk.
“We used ultrasound to look under the skin and directly measured what the user’s muscles were doing during several walking tasks,” said Richard Nuckols, a postdoctoral research associate at SEAS and co-first author of the paper. “Our muscles and tendons have compliance which means there is not necessarily a direct mapping between the movement of the limbs and that of the underlying muscles driving their motion.”
What sets this method apart from previous ones is the exoskeleton’s ability to automatically determine the assistance a person needs for different walking speeds and slopes. The exosuit only requires a few seconds of walking to capture the muscle’s profile.
This exosuit can adjust quickly to real-world conditions, according to the researchers. When researchers measured the metabolic energy used with and without the suit, they found that the suit significantly reduced the amount of metabolic energy used.
The research is a collaboration between the Harvard Biorobotics Lab and the Harvard Biodesign Lab run by Conor J. Walsh, the Paul A. Maeder Professor of Engineering and Applied Sciences at SEAS. SEAS researchers plan to move forward by testing how the system does with constant real-time adjustments.
SEAS’ full research can be found here.




Tell Us What You Think!