|
Listen to this article
 |

Skyline Robotics leverages industrial robotics arms to autonomously wash skyscraper windows. | Credit: Skyline Robotics
Skyline Robotics, developers of OZMO, the world’s first high-rise window-cleaning robot, today announced the company has received its first patent for its robotic window-cleaning system. The patent, awarded by Singapore, includes the design of the system as well as how the system operates. Skyline has filed its patent in nine jurisdictions globally, with Singapore being the first to independently evaluate and validate the company’s innovations.
Skyline Robotics is a 2023 RBR50 innovation award winner for this unique solution to skyscraper window cleaning automation.
“As this is our first patent awarded, it is a big milestone related to the uniqueness of our technology,” said Michael Brown, CEO & chairman, Skyline Robotics. “It also means our method of implementation will now be protected, starting in Singapore, with the belief that more patent awards will be coming on a global scale. This is foundational proof that our team, our company provides innovation in a way that others never have.”
Skyline Robotics’ first patent comes as the company is in the midst of a global expansion. The first Ozmo robots have been deployed in New York City in partnership with Platinum, Inc. where Skyline has already performed work at 10 Hudson Yards, 383 Madison, 825 3rd Avenue, and 7 World Trade Center. Moving forward, Skyline aims to bring Ozmo to buildings across the world.
Skyline’s flagship robot, OZMO, combines artificial intelligence, machine learning and computer vision with advanced robotics and sensors to tackle some of the most pressing industry challenges including labor shortages and worker safety. With OZMO, window washing can be performed up to three times faster than humans, without putting workers at risk. Additionally, as OZMO is operated by humans, it is not replacing human window washers, but is accelerating a future where humans and robots work together. The result is a smarter, faster, safer, and more economical alternative to human window washers.
A summary of the claimed invention
Patent number: WO2019155473A1
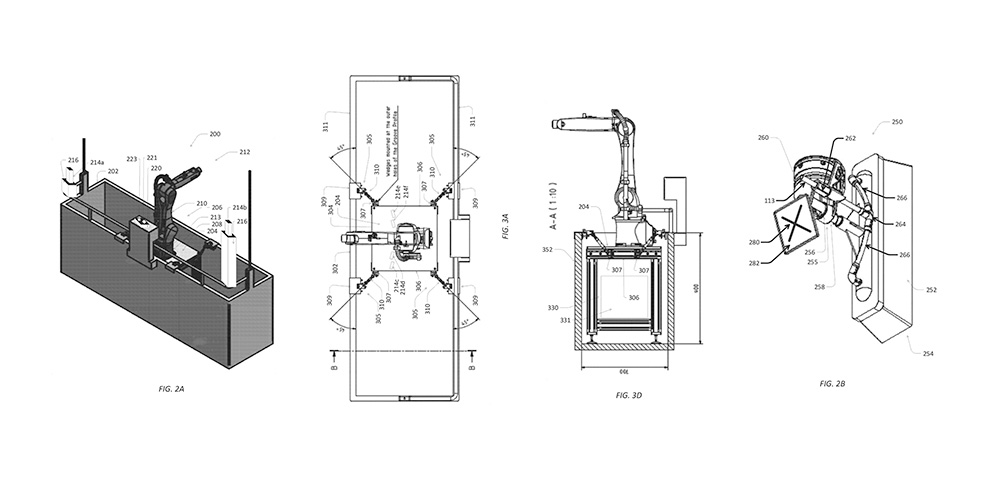
Summary: The present invention provides a computer-implemented method for controlling the cleaning of a building facade from an elevator platform. It involves receiving a multi-dimensional map and determining an ordered sequence of instructions, which includes robotic arm instructions and elevator platform instructions. The instructions are temporally intertwined to execute a cleaning pattern covering at least part of the facade. The instructions are forwarded via at least one first interface and the elevator platform instructions via a second interface.




Tell Us What You Think!