A robot being developed at Nottingham Trent University (NTU) uses two Universal Robots UR5 cobot arms to drill holes in vertebrae and correct spinal deformities. Dubbed the “Scoliobot,” the team hopes the robot will soon perform spinal surgery with greater accuracy than today’s procedures.
Here’s how a procedure using Scoliobot would work. First, a patient gets a scan of their spine to detail the issue at hand, whether it be scoliosis, kyphosis or another spinal deformity. Using that information, the surgeon guides Scoliobot into position and locks it into place with the particular vertebrae being worked on.
The two UR5s work in collaboration during the procedure. One UR5, called the Datum Robot, is secured to a vertebrae and moves with it to follow the natural movements of the patient. It relays data on this movement instantaneously to a computer. The other cobot arm, the Tooling Robot, then adjusts automatically to remain on its pre-defined path and continue to drill accurately. According to the team, accuracy of the robot’s drilling has been recorded at 0.1 millimeters.
The Tooling Robot drills holes in either side of the vertebrae, which is where the surgeon places pedicle screws. These screws are attached to deformity rod reducers that allow surgeons to lever individual vertebrae and realign the spine.
There are a few robotic-assisted spinal surgery systems on the market, including the Mazor X from Mazor Robotics. The Mazor X is used for analysis before the operation, guidance during the operation and for real-time 3D verification during surgery. The surgeon, however, still controls the drilling. Mazor Robotics was acquired by Medtronic for $1.7 billion late in 2018.
It’s important to note the Scoliobot is still in the research stages and hasn’t been tested on actual patients. To ensure accuracy and safety, Professor Philip Breedon of NTU’s Medical Design Research Group tells The Robot Report Scoliobot is about to be tested on 3D patient data-based spinal models.
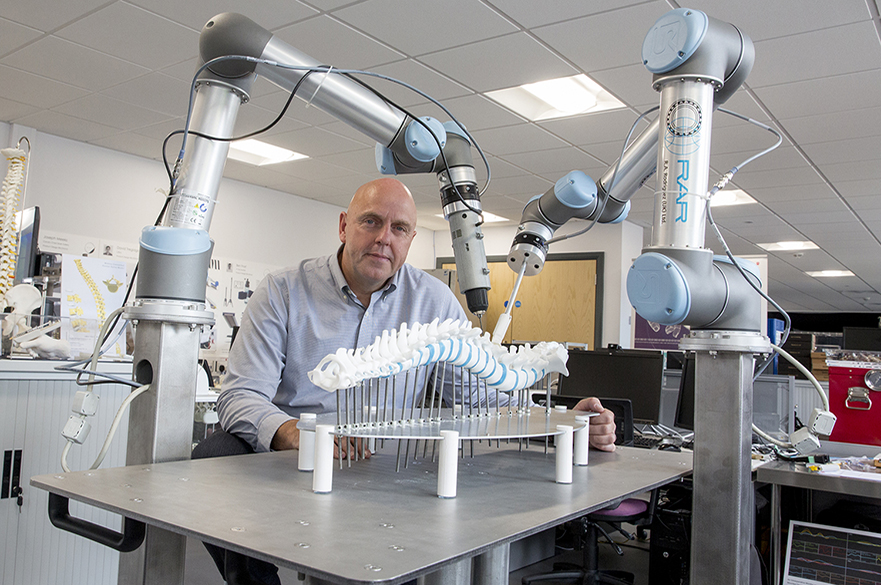
Professor Philip Breedon with Scoliobot. (Credit: NTU University)
“These models are 3D printed models which accurately replicate the spine/individual vertebrae,” he said. “Major challenges to date have been associated with eliminating any latency between the two robots, ensuring the robots are positioned optimally for reach and intervention and developing a useful and intuitive user interface.”
The research also explores the use of augmented reality to provide surgeons with live visual feedback to illustrate the depth of each hole as it is drilled.
“I’d love to say in a couple of years, but there is a lot of testing to be done,” Breedon about a potential timeline to turn Scoliobot into an actual product. “Hopefully within the next five to ten years, depending on health and safety measures.”
“It is paramount that spinal procedures are carried out with total accuracy in order to minimise what can be substantial risks to a patient,” said professor Boszczyk, head of spinal surgery at Benedictus Krankenhaus Tutzing and visiting professor at NTU. “This technology has the potential to minimize those risks by performing a key part of the operation with accuracy which cannot be achieved by a human hand.
“It’s a brilliant example of how robotics can enhance and improve the way in which intrusive operations are carried out, improving patient safety and ensuring efficiency of process.”




Tell Us What You Think!