|
Listen to this article
 |

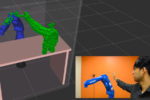
Two Kawasaki welding robots coordinate their motions using RealTime Robotics RapidPlan software. | Credit: RealTime Robotics
Realtime Robotics released its new RapidPlan software this week to help manufacturers design and deploy industrial automation faster and more efficiently.
RapidPlan helps automate the programming, deployment and control of industrial robots. The solution automatically calculates robot paths and avoids collisions during operations. RapidPlan is a unique solution for multi-robot workcells, where the work envelopes of the robots overlap and collisions are possible.
For industrial robots, complex workcells with intricate operations can take weeks to months to plan. Realtime Robotics is designed to abstract robot control regardless of the robot vendor and removes the need for brand-specific robot programming.
RapidPlan has a complete simulation environment that enables both offline programming of the robot as well as accelerating the robot deployment process. System integrators can effectively prepare all of the robot programming in simulation, even before the “metal” hits the production floor. The motions in simulation and as-built reality match, dramatically speeding up the design and deployment processes.
As robotic processes change over time or as requirements for optimization evolve, RapidPlan provides a programming environment that provide a highly-flexible solution. RapidPlan can use the information from PLCs (programmable logic controllers) or from dedicated 3D sensors to improve the planning and operations process.
“Optimizing the efficiency of your industrial and factory operations should not be held back by technical barriers,” added George Konidaris, co-founder and Chief Roboticist of Realtime Robotics. “We specifically designed RapidPlan to deliver an accurate simulation of robot task planning, making it easy to program models and use them directly on the factory floor, but did so in a way that streamlined the process and made the technology easy-to-use for all.”
Bin picking has traditionally been a challenging application for a multi-robot setup. Users don’t know the exact part location for picking, making it challenging to predict an accurate collision-free path for multiple robots that are completing tasks in the same area. With RapidPlan, robot space reservations are released in real time as soon as the robot moves to another location, dramatically improving cycle time or other parameters that users prioritize.
During the on-site physical validation stage, a manufacturer typically needs to have a highly-skilled team working after hours to manually run through every move combination, ensuring seamless operations on the live factory floor. Because RapidPlan inherently produces collision-free paths, it reduces the need to verify against potential collisions – resulting in significant time savings.
RapidPlan will alert the user of any potential collision beforehand, so steps can be taken to prevent it. If a cycle is interrupted for any reason, the user can easily and quickly return the robots to their home poses without needing to individually jog them home.
“The combination of Kawasaki’s quality robots, advanced programming platform and Realtime Robotics software is an industry game changer. Providing manufacturers from all industries with unprecedented flexibility, from automating programming of robotic motion and collision avoidance to the very design of the manufacturing floor. This is the future of automation, and the very best has yet to come,” added Kazuhiro Saito, President at Kawasaki Robotics.
Realtime Robotics RapidPlan software consists of two main components:
RapidPlan Create
With RapidPlan Create, users can easily create a digital twin workcell. Users import cell elements, such as CAD files or other components from a library, then click and point to create targets and goals. Realtime Robotics software automatically generates offline programs and interlock locations for industrial robots.
RapidPlan Control
RapidPlan Control makes collision-free operation a reality for industrial settings and factory floors. Customers can have confidence in robot motions and dynamic obstacle avoidance because of Realtime Robotics software. Motions remain collision-free, even after live floor changes. Automated fault recovery provides high flexibility and adaptability to robot cells.
The launch of RapidPlan marks a shift by Realtime Robotics towards software products, based on customer feedback, with the goal of making it even easier to integrate the company’s solutions into existing technology stacks. Realtime Robotics’ innovative RapidPlan software is compatible with engineering workstations, field laptops and industrial PCs, giving customers the option to utilize the software in their method of choice. RapidPlan’s modular flexibility empowers organizations to better scale their production lines across multiple factories, as their operations expand.
Realtime Robotics will also be on-site at Automate 2022 this week. Its executives will be giving presentations and its technology will be on display in demos at the Kawasaki Robotics Inc. booth (#2332) and the Mitsubishi Electric Automation booth (#1023).
Editors Note:
George Konidaris, co-founder and Chief Roboticist of Realtime Robotics was a guest on Episode 53 of the Robot Report Podcast.




Tell Us What You Think!