Motus Labs M-DRIVE
Motus Labs, a Dallas, Texas-based startup that builds robot joint actuators and drives, came out of stealth mode today and unveiled what has been in the works for five-plus years. The Motus M-DRIVE, which features a gearless drive design, uses mating blocks instead of traditional gear teeth. The M-DRIVE will be available in the second quarter of 2019.
The M-DRIVE will target both service and industrial robot suppliers. At press time, Motus Labs co-founder and CEO Joe Pollard told The Robot Report it had one confirmed customer in the service robotics market, but it expects to have up to five customers by launch.
“We intend to first engage with service robot providers since they are more willing to accept new technology and many of their applications may require some of our metric capabilities – high torque density, precision control, lightweight,” Pollard said. “The service space has more people to sell to and shorter sales cycle. It’s a good place to be as we get going. The industrial robotics space has longer sales cycle, but the volumes are high. So we will also participate in that, but we want to be prevalent in service side first.”
How M-DRIVE Works
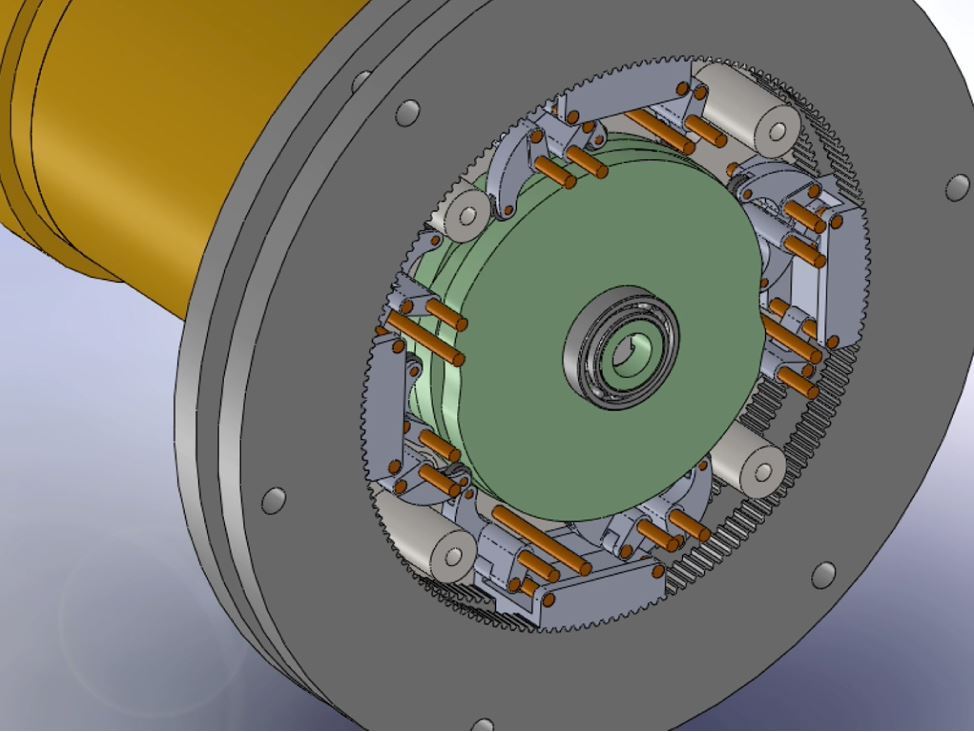
Pollard said the traditional gear teeth were replaced with low-friction, aluminum and plastic mating surfaces that act like “cleated shoes running” on the inside of a cylinder. Pollard said the M-DRIVE can have up to seven gear teeth performing in concert with one another. Motus claims this increases the contact area, which results in more torque for given weight and lower weight for given torque, creating rigidity and stable control over the robot.
“A few number of teeth typically carry the load, but that produces heat,” Pollard said. “We want to help robotics manufacturers fix those issues – less heat, less friction, lower weight, better efficiencies and better positioning.”
All articulated robots have multiple actuators – a combination of motors and gears – that control positioning and acceleration on various axes. While acknowledging they are the most critical part of a robot, Pollard said robots are often over-specified in terms of actuators and use corrective technologies for precision, which leads to higher overall cost. A faster ROI, Motus said, will open up new applications for those manufacturers.
Motus Labs M-DRIVE
“In an optimal environment, you want the motor to do the work and achieve high-performance metrics without corrective actions, reducing robotic cost and complexities,” said Dr. Mark Spong, technical advisor and founding investor, Motus Labs, and a professor of systems engineering and electrical and computer engineering at the University of Texas at Dallas.
“If the drive weighs less, the motors can become smaller, and each joint on the robot weighs less,” said Pollard. “It’s a cumulative effect. Each point of savings adds to lower overall cost of building the robot.”
Facing the Competition
Motus faces some stiff competition, going head-to-head with heavyweights such as Harmonic Drive, Nabtesco, Nidec and others. Pollard said the goal is to not create a price war with its competition.
“If you’re just replicating the product, volume is the only way to drive the cost down, but Harmonic already has that,” said Pollard. “We’re taking a new approach. We don’t want to be in a race to the bottom price. We want people to understand what we do and get into companies who have cool ideas but just can’t get there because of solution cost. We don’t want to be the low-priced leader in gearing technology, we want to provide the best drive technology with high performance metrics yet a lower overall solution cost to enable companies to build this into their robots to get into markets they couldn’t.”
Motus Labs currently has 15 full-time and part-time employees. It hopes to have about 50 employees by the end of 2019. While the M-DRIVE technology has been in the works for five-plus years, the company officially launched in July 2018 with a $1.5 million Seed Round that was self-funded by some of the company founders.
Motus is currently securing a Series A investment round and is accepting beta customers for M-DRIVE applications.




Is this really a better solution to a traditional gear drive? Looks awfully complicated. I count 5 moving parts per cleat unit, so with 4 units that’s 20 moving parts, all subject to wear, bearing failure, lubricant contamination and so forth. Not to mention the cost of manufacture, testing, maintenance and repair.
I had the same thoughts, John; I was so curious I tried to estimate the number of small bearings, and came up with at least 100 pivots. It is a super cool technology, and I bet that you can design it in such a way as to be either blocking or non-blocking, which might be really interesting for reducing hold torques etc.