BUFFALO, N.Y. — Most humans take the ability to adjust the firmness of their grip for granted, but many robots lack a dynamic gripper to gently but accurately manipulate a range of objects. Researchers at the University at Buffalo developed a two-fingered dynamic gripper that they said could not only refine robotic grasping, but also improve safety for robots that work around people.
The design of the robotic hand enables it to absorb energy from impacts during collisions. This prevents whatever the robot is holding from breaking, and also makes it safer for people to work with and near the machines.
Such a dynamic gripper would be a valuable asset for human-robot partnership in assembly lines in the automotive, electronic packaging and other industries, said Ehsan Esfahani, Ph.D., associate professor of mechanical and aerospace engineering in the University at Buffalo (UB) School of Engineering and Applied Sciences.
“Our robotic gripper mimics the human hand’s ability to adjust the stiffness of the grip,” he said. “These grippers are designed for collaborative robots that work together with people. They’re going to be helpers, so they need to be safe, and variable stiffness grippers help to achieve that goal.”
A new study published online on Sept. 10 in IEEE Transactions on Industrial Electronics highlights the dynamic gripper’s safe design, including through experiments showing how the gripper’s shock-absorbing features keep a spaghetti stick from breaking during a collision.
The dynamic gripper developed at UB uses magnetic repulsion to adjust the stiffness of its grip and absorb energy from collisions. This prevents objects like this spaghetti stick from breaking. Credit: Douglas Levere, University at Buffalo
Magnets give dynamic gripper a soft touch
Esfahani explained that magnets are the secret behind the robotic gripper’s versatility.
Instead of having two fingers that are fixed in place, each of the dynamic gripper’s fingers has a magnetic base that sits between two neodymium magnets that repulse, or push against, the finger.
The air gap between the magnets acts like a spring, creating a little give when the hand picks up an object or collides with an external force. The stiffness of the grip can also be adjusted by increasing or decreasing the space between magnets.
In the new paper, Esfahani and Amirhossein Memar, a former UB Ph.D. candidate in mechanical and aerospace engineering, reported on these safety features.
In one set of tests, the engineers placed a short stick of spaghetti lengthwise between the fingers of the robotic hand.
When the gripper crashed into a fixed object, the device detected the external force being applied, which caused the magnets to adjust their position, temporarily reducing the stiffness of the grip and allowing the gripper to absorb some of the energy from the collision.
The end result? The spaghetti stick stayed in one piece.
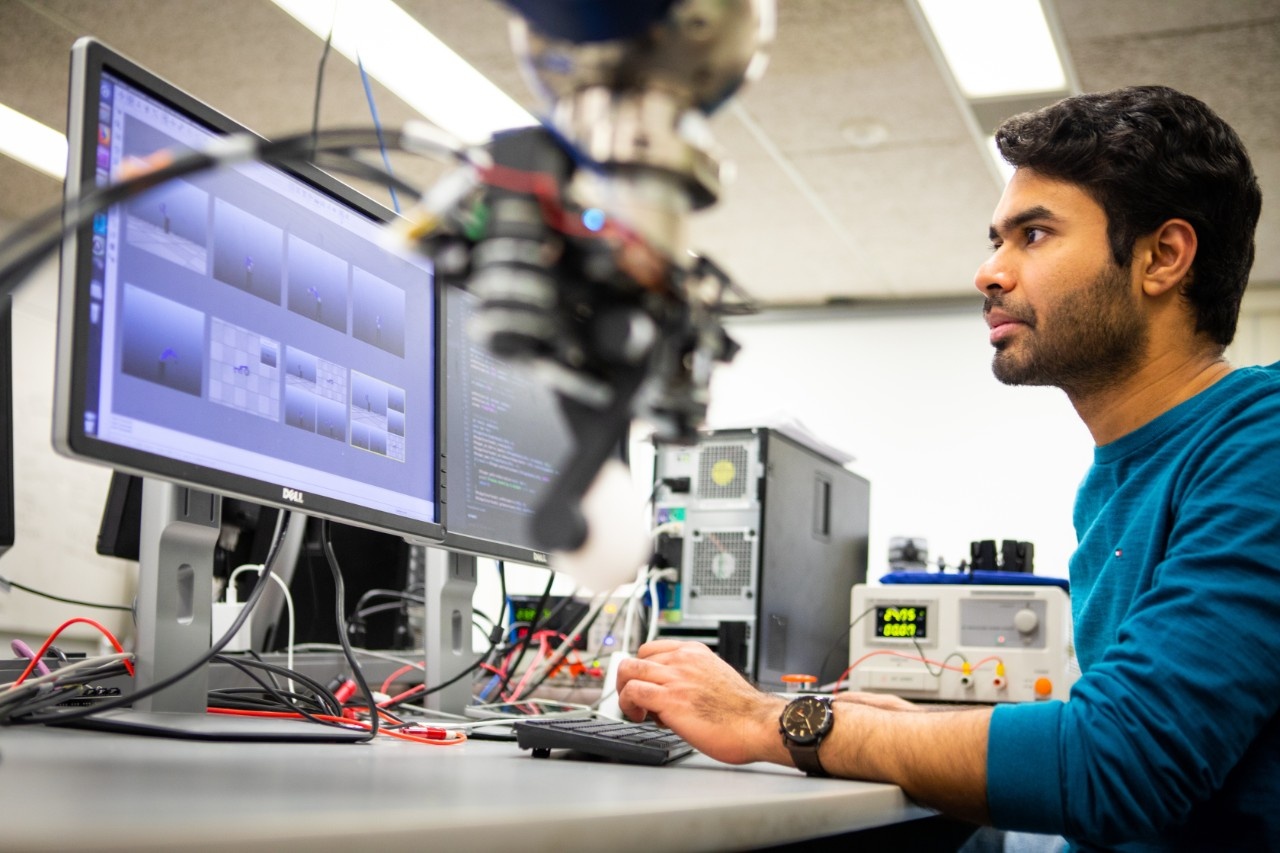
Sri Sadhan Jujjavarapu, a UB Ph.D. student in mechanical and aerospace engineering, views digital data showing how the robotic gripper moves. Credit: Douglas Levere, University at Buffalo
Next steps in development
Esfahani noted that the dynamic gripper his team is developing can be attached to commercially available robot arms that many facilities already use. This could lower the cost of adapting the technology for companies interested in improving the safety and capabilities of existing machines.
Esfahani is launching a startup company to commercialize the gripper, licensing technology from UB.
His team has received $55,000 from the Buffalo Fund: Accelerator — funded by the Innovation Hub, which is administered by UB and supported by Empire State Development — to further develop the robotic hand. In addition to refining the current design of the gripper, the team may also explore advances such as adding a third finger.
Researchers who have been involved in designing and testing the gripper include Ph.D. student Sri Sadhan Jujjavarapu and Memar, the co-author on the new spaghetti stick study, who has received his Ph.D. from UB and is now a postdoctoral research scientist at Facebook Reality Labs.
Editor’s note: This article is republished from the University at Buffalo, part of the State University of New York system.
![]()
The Robot Report is launching the Healthcare Robotics Engineering Forum, which will be on Dec. 9-10 in Santa Clara, Calif. The conference and expo will focus on improving the design, development and manufacture of next-generation healthcare robots. Learn more about the Healthcare Robotics Engineering Forum, and registration will be open soon.




Tell Us What You Think!