A virtual Atlante exoskeleton moving from sitting to standing position. | Credit: University of Michigan
Exoskeleton users can now go from sitting to standing safely and without assistance based on the work of University of Michigan researchers, who developed an approach to create and test solutions to such problems virtually.
“We now have a way to systematically design control objectives for highly constrained systems such that the objectives are not in conflict with the contact constraints,” said Eva Mungai, a PhD candidate in Mechanical Engineering.
You can read the researcher’s paper here: “Feedback Control Design for Robust Comfortable Sit-to-Stand Motions of 3D Lower-Limb Exoskeletons.”
Similar research on the sit-to-stand activity is often done with a simplified model due to the complexity that three dimensions introduces. That work focuses on the sagittal plane, the X-axis of the sit-to-stand problem, while Mungai’s work incorporates sagittal, frontal, and transverse planes, or X, Y, and Z-axes.
“While it’s easier to figure out stability for linear systems, it’s quite difficult to analyze for non-linear systems in three dimensions,” said Mungai, who is advised by Jessy Grizzle, professor of electrical and computer engineering and Director of U-M Robotics Institute.
Adding to the complexity of the problem is the need to guarantee both an exoskeleton user’s safety and comfort. To address the complexity, Mungai and Grizzle split the problem into three challenges:
- Modeling the exoskeleton in 3D
- Creating the sit-to-stand motions
- Executing and testing the motions to make sure the system operates in real-time to meet the goal while keeping the user comfortable and safe.
Wandercraft, creators of the Atlante exoskeleton, provided the universal robot description file for Mungai to use for modeling and generation of chair-to-stand and chair-to-crouch-to-stand motions, which could then undergo testing.
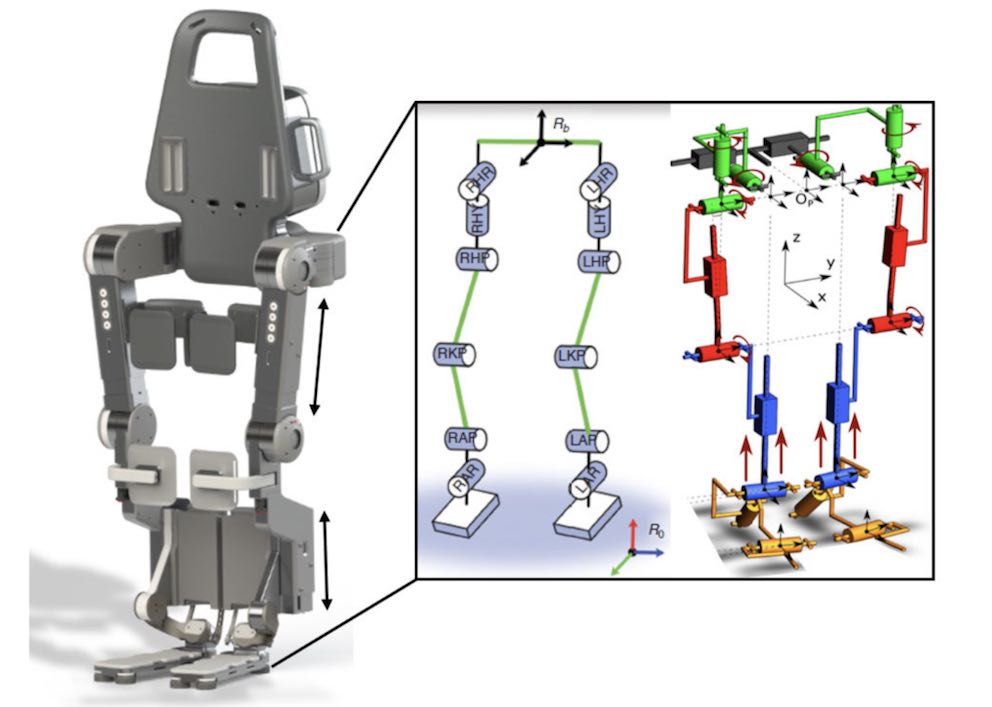
Kinematics of the Wandercraft Atlante exoskeleton. | Credit: University of Michigan
Most exoskeletons don’t support a sit-to-stand motion without outside assistance. According to the U-M researchers, there are only two hands-free exoskeletons on the market: REX from REX Bionics and Atalante. The paper focused on Atalante because a detailed model was shared with the authors. Moreover, because Atalante has been explicitly designed for dynamic walking, it is interesting to seek dynamic standing trajectories that can be achieved with minimal user assistance, and no other assistance, or even no user assistance at all.
A static sit-to-stand motion requires intermediate poses to be stable throughout the motion, while dynamic motion refers to a continuous trajectory, which, like a dynamic walking gait, does not guarantee stability at intermediate points of time. Even though the “inherent stability” of a static motion appears to be more desirable than a dynamic motion, the severe constraints required by the trajectory are often incompatible with hardware limitations (e.g., joint torque limits). External force from the user, either by pushing downward on the arms of a chair, crutches, or FES [12], have been used to achieve assisted sit-to-stand motions. Allowing for the user to apply an external force can enhance stability of the motion as well as user confidence in the motion.
“In order to find the operational range of the exoskeleton+user system that satisfied our criteria for user safety and comfort, we ran robustness tests based on the various situations the system could encounter such as different users, chair heights, asymmetric torque outputs, or no assistive force from the user. These robustness tests also helped us analyze the two sit-to-stand motions.”
Ensuring a system successfully completes its task while still operating within its numerous constraints, such as user safety, is a concept that can apply across robotics. One apparent application is on bipedal robots, where they have to choose an objective while maintaining balance and coming into contact with external forces.
Also an important step in this work is the focus on comfort.
“It’s really hard to quantify user comfort, but it’s so important, and this is just a beginning,” said Mungai.
Editor’s Note: This article was republished from the University of Michigan.




Tell Us What You Think!