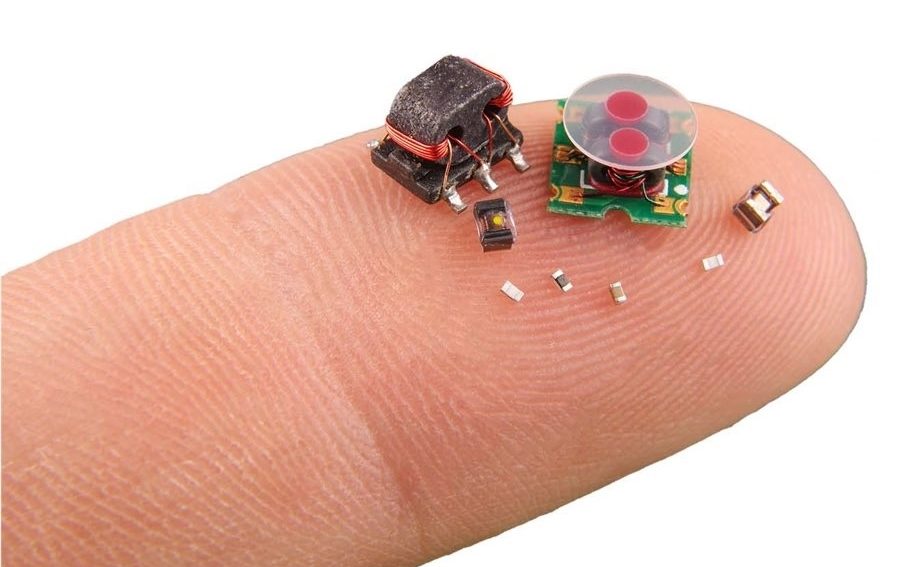
The DARPA SHRIMP program looks to foster innovation in microrobots. (Credit: DARPA)
The U.S. military has been studying microrobots for years, but they tend to be simple machines with limited intelligence. Earlier this week, however, the Defense Advanced Research Projects Agency (DARPA) launched a new initiative to improve microrobots that are limited by size, weight and power (SWaP).
DARPA SHRIMP (SHort-Range Independent Microrobotic Platforms) is a new competition to develop multi-functional micro-to-milli robotic platforms for use in disaster relief scenarios. Specifically, DARPA SHRIMP is looking for proposals in the following areas: actuator materials and actuator mechanism development; integrated multi-mode power solutions for both storage and high voltage conversion; and untethered, multifunctional micro-to-milli robotic platforms.
“The current state of insect-scale robotics has focused primarily on mobility, with limited additional functionality due to constraints imposed by energy-inefficient actuation and limited energy storage at this scale,” DARPA says. “Thus, such robots tend to be simple, possess limited intelligence, and lack the power, navigation, actuation, and control to accomplish tasks beyond moving.”
And if your idea is innovative enough, you will be rewarded. The DARPA SHRIMP program has $32 million of funding to spread around. Abstracts are due August 10, while proposals are due September 26. The actual DARPA SHRIMP competition could happen as early as March 2020.
Here’s more from DARPA: “Micro-to-milli (i.e. insect scale) robotic research has benefited tremendously from prior technological advances in microelectromechanical systems (MEMS) and specific technologies for building small robots, such as additive manufacturing, piezoelectric actuators, and low power sensors. However, as yet, there are no complete micro- or milli-robotic systems with the ability to perform complex tasks proficiently. Moreover, the vast majority of micro- and milli-robots today rely on tethers (physical, optical, magnetic, or RF) to supply power, control, and processing which limits their usability in real-world applications.
“SHRIMP aims to develop and demonstrate, through a series of Olympic-themed competitions, multi-functional mm-to-cm scale robotic platforms. To achieve this goal, SHRIMP will also develop fundamental actuator and power components to facilitate advances in these platforms. The objective is to realize short range micro-to-milli robotic platforms capable of performing complex tasks for disaster and emergency relief activities, as well as inspection of hazardous environments that are inaccessible to larger robotic platforms. As a guide to drive the innovations in these platforms, aspects of the National Institute of Standards and Technology (NIST) first responder robotics test facility1 have been adapted for micro-to-milli robots. The key drivers are mobility, manipulation, improvements of actuator materials and mechanisms, power storage/endurance and conversion circuitry, and platform engineering for extreme size, weight, and power (SWaP) minimization.”
DARPA SHRIMP Olympics-like competition
The competition will be divided into three parts. The first will look at new materials, seeking to increase the degree of force that the actuators can output; the second will look to increase the transduction efficiency of limbs and other appendages. The third phase will combine the first two phases. DARPA SHRIMP participants will compete in a series of “Olympic-themed contests,” DARPA says. Here’s a look at the tentative DARPA SHRIMP events:
High Jump: The microrobotic actuator-power system must propel itself vertically from a stationary starting position, with distance measured only in the vertical direction and survivability as the judging criteria. The average of three jumps will be used, though up to five attempts can be made. The power system can be recharged between jumps.
Long Jump: The microrobotic actuator-power system must propel itself horizontally from a stationary starting position, with the distance measured only in the horizontal direction and survivability as the judging criteria. The average of three jumps will be used, though up to five attempts can be made. The power system can be recharged between jumps.
Weightlifting: The microrobotic actuator-power system must lift a mass, with progressively larger masses until the actuator system fails to lift the weight. Vertical lift distance will be considered in the judging criteria. Time duration of the lift (target > 300s) will also be considered in the judging criteria as a means of measuring endurance of the combined actuator system. The power system can be recharged between lifts.
Shotput: The microrobotic actuator-power system must propel a mass horizontally, with the distance measured only in the horizontal direction as the judging criteria. Both 1-gram and 5-gram masses must be attempted. The average of three attempts will be used, though
up to five attempts can be made. The power system can be recharged between attempts.
Tug of War: The microrobotic actuator-power system will be connected to a load cell to measure the blocking force of the actuator mechanism. Time duration of the tug (target > 300s) will also be considered in the judging criteria. The average of three attempts will be used, though up to five attempts can be made. The power system can be recharged between attempts.
Rock Piling: For each attempt, the microrobot must travel to, lift, and stack weights (varying from 0.5 to 2.0 g) in a minimum of two layers without human interaction or recharge between lifts. The total number of weights stacked is the judging criteria. Up to three attempts can be made for a given set of weights and the microrobot can be recharged between attempts.
Steeplechase: Competing teams will be given precise locations and types of obstacles (e.g. hurdle, gap, step, etc.) relative to the starting location. For each attempt, the microrobot must traverse the course without human interaction or recharge between each obstacle. The number of cleared obstacles and total distance will be used as the judging criteria. Up to three attempts can be made and the microrobot can be recharged between attempts.
Biathlon: Competing teams will be given the choice between three beacon types (temperature, light, or sound) or they may choose to use all 3 types of beacons. For each attempt, the microrobot must traverse to a series of beacon waypoints to create an open circuit without human interaction or recharge between each waypoint. The number of cleared waypoints and total distance will be used as the judging criteria. Up to three attempts can be made and the microrobot can be recharged between attempts.
Vertical Ascent: Microrobots will traverse up two surfaces, one with a shallow incline (10o) and the other with a sharp incline (80o). The total vertical distance traveled will be the judging criteria. Up to three attempts can be made and the microrobot can be recharged between attempts.
Teams may use a single microrobot to compete in all the DARPA SHRIMP competitions and/or separate robots for each competition. DARPA does say, however, that preference will be given to robots capable of competing in multiple events.
“Whether in a natural-disaster scenario, a search-and-rescue mission, a hazardous environment, or other critical relief situation, robots have the potential to provide much-needed aid and support,” says Ronald Polcawich, a DARPA program manager in the Microsystems Technology Office. “However, there are a number of environments that are inaccessible for larger robotic platforms. Smaller robotics systems could provide significant aide, but shrinking down these platforms requires significant advancement of the underlying technology.”


Tell Us What You Think!