|
Listen to this article
 |
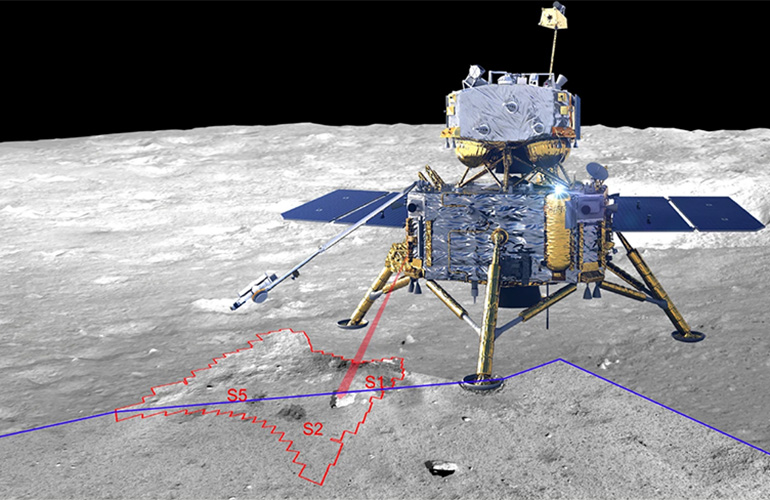
A schematic diagram of the Chang’E-5 lander and its scoop sampling points marked by the red line. | Source: CNSA/CLEP
Back in January, we wrote about China’s Chang’E-5 lunar lander discovering water on the moon for the first time ever on-site and in real time. Now, the team behind the lander has determined where that water came from.
Chang’E-5 landed on the moon in December 2020 and was tasked with collecting lunar rocks and soil to bring back to Earth. The lander collected samples from the Moon’s Oceanus Procellarum, an ancient basalt, and used its mineralogical spectrometer to detect water on site.
While the lander didn’t find flowing lunar rivers or springs, it did find, on average, 30 hydroxyl parts per million in rocks and soil on the Moon’s surface. Hydroxyl particles are water’s smoking gun, they’re made of one oxygen and one hydrogen atom, the main ingredient of water, and the particles are the most common result of water molecules chemically reacting with other matter. They’re strong evidence that water once existed in that area.
The Chang’E-5 Lander collected the samples at the hottest part of the Moon’s day, when temperatures neared 200ºF. At this time, the surface was at its driest.
When the particles were first detected, scientists theorized that the particles came from solar wind, a constant stream of charged particles coming from the sun. Now, however, the team determined that solar wind only weakly contributed to the amount of hydroxyl the lander found.
“This excess hydroxyl is indigenous, demonstrating the presence of lunar-originated internal water in the Chang’E-5 lunar samples, and that water played an important role in the formation and crystallization of the late lunar basaltic magma,” Chunlai Li, co-corresponding author on the paper and deputy director of the National Astronomical Observatories at the Chinese Academy of Sciences, said. “By investigating lunar water and its source, we are learning more about the formation and evolution of not just the Moon itself, but also the solar system. In addition, lunar water is expected to provide support for future human lunar in-situ resources.”
The team results were published in Nature Communications. In the future, the team plans to do more lunar explorations with Chang’E-5’s successors, Chang’E-6 and Chang’E-7. China is the third country to bring samples back from the moon, after the United States and the Soviet Union.
Robotics on the moon
In 2023, China plans to launch the Chang’E-6. The lander is meant to be a backup to the Chang’E-5, but it will head to the lunar south pole for samples. Before Chang’E-6 takes off, Astrobotic’s Peregrine Lunar Lander will take off sometime in late 2022.
The Peregrine Lander is outfitted with a number of payloads, including Carnegie Mellon University’s Iris moon rover, which plans to search for evidence of water at the Moon’s south pole. The rover weighs about four pounds, and is about the size of a shoebox. It was fitted to the lander in December 2021.
A payload from the National Autonomous University of Mexico (UNAM) will also be on board the lander, making it the first ever Mexican mission to the moon. The COLMENA payload, or “hive” in English, will involve a self-organizing swarm of five robots.
Each robot weighs less than 60 grams and measures just 12 centimeters in diameter. The robots are equipped with small solar panels. Their job is to autonomously navigate themselves to achieve electrical connectivity by joining their panels together to make a larger solar panel. The project will demonstrate how feasible it may be to build structures on planetary surfaces with robot swarms. During the mission, the robots will also take the first-ever lunar plasma temperature, electromagnetic and regolith particle size measurements.








Tell Us What You Think!