
Brian Gerkey said “greater institutional support from Intrinsic and the resources from this transaction allow our team to focus on what we do best and accelerate development of ROS, Gazebo, and Open-RMF in a sustainable way.”
How ROS 2 fixed a robot arm’s latency, jerky motions

Optimax approached PickNik Robotics for help improving the smoothness and latency of their robots using by using ROS 2.
Robotics Engineering Week to address critical development issues

Robotics Engineering Week’s sessions are focused on critical topics for robotics and automation professionals.
NVIDIA adds AMR fleet management tools to Isaac ROS

NVIDIA released the latest update to its Isaac Robot Operating System (ROS) software, Developer Preview (DP) 2.
Clearpath Robotics launches outdoor autonomy software
Clearpath Robotics’ new OutdoorNav technology provides GPS-based navigation for Clearpath’s outdoor mobile robots and third-party vehicles.
NCS Robotics adding security robot capabilities to Open-RMF

NCS Robotics is working with Open Robotics to extend the Open-RMF capabilities to support security robot use cases.
NVIDIA releases robotics development tools at GTC

NVIDIA released Jetson Orin Nano system-on-modules, updated its Nova Orin reference platform for autonomous mobile robots and announced cloud-based availability for its Isaac Sim technology.
Clearpath simplifies ROS integration with its mobile robots
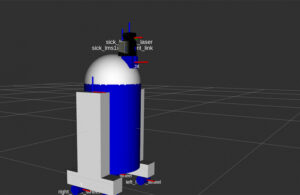
Clearpath Robotics said it’s now easier to install, use, and diagnose issues with ROS on its mobile robots.
Autonomics RADAR for autonomous mobile robots

The new RADAR sensor is designed for the navigation requirements of outdoor AMRs and autonomous vehicles.
Brian Gerkey on the success of Open Robotics and ROS

This week, we talk to Brian Gerkey the co-founder and CEO of Open Robotics about ROS and open source software.
ROS 2 driver now available for ABB’s robot arms
PickNik Robotics and Optimax Systems released a ROS 2 driver for ABB manipulators. The package has been tested with an ABB IRB 1200-5/0.9 manipulator.
New ROS2 release Humble Hawksbill

Humble Hawksbill is a long-term support (LTS) release that will be supported until May 2027. It is the first ROS 2 release on Ubuntu 22.04
ROS 2 driver now available for UR cobot arms

Developed by Universal Robots, PickNik Robotics and FZI Forschungszentrum Informatik, the driver is compatible across the entire line of UR cobots.
MOV.AI and Ouster partner to advance sensing for mobile robots

The partnership enables MOV.AI customers to quickly integrate Ouster LiDAR units into the AMR platform.
Lanner, MOV.AI partner to expedite mobile robot development

Collaborative solution to provide both the machine vision computing and software platform developers need to build and deploy mobile robots.
iRobot launches Create 3 educational robot

Now with ROS 2 and Python support, Create 3 is iRobot’s smartest developer platform to date.
ROS 2 now available on Clearpath Robotics’ Husky UGV

Clearpath Robotics’ Husky UGV is an all-terrain mobile robot that weighs in at 110 lbs, and has a payload capacity of 165 lbs.
Open Robotics emphasizing interoperability at Robotics Summit
Brian Gerkey, co-founder and CEO of Open Robotics, will discuss how companies are addressing interoperability and what options are available to vendors, end users, and integrators.
Open Robotics celebrates 10th anniversary

All we had was a dream, some open-source code, and some very smart friends, a whole lot of them.
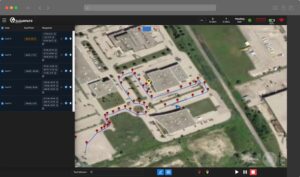
The importance of data visualization in robotics
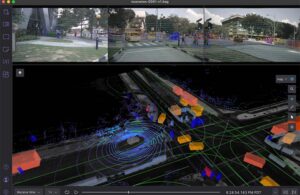
To successfully introduce robots to the public at scale, we need to acknowledge robotics as a more open-ended endeavor that requires more diverse tooling than traditional software development.
RE2 and PickNik announce strategic partnership

RE2 Robotics will develop its autonomous robotic systems for robotic arms with PickNik Robotics’ Movelt Studio software.
Open Robotics developing Space ROS with Blue Origin, NASA
Space ROS is a version of ROS 2 meant to meet verification and validation requirements aerospace software must meet before being used in a mission.