|
Listen to this article
 |
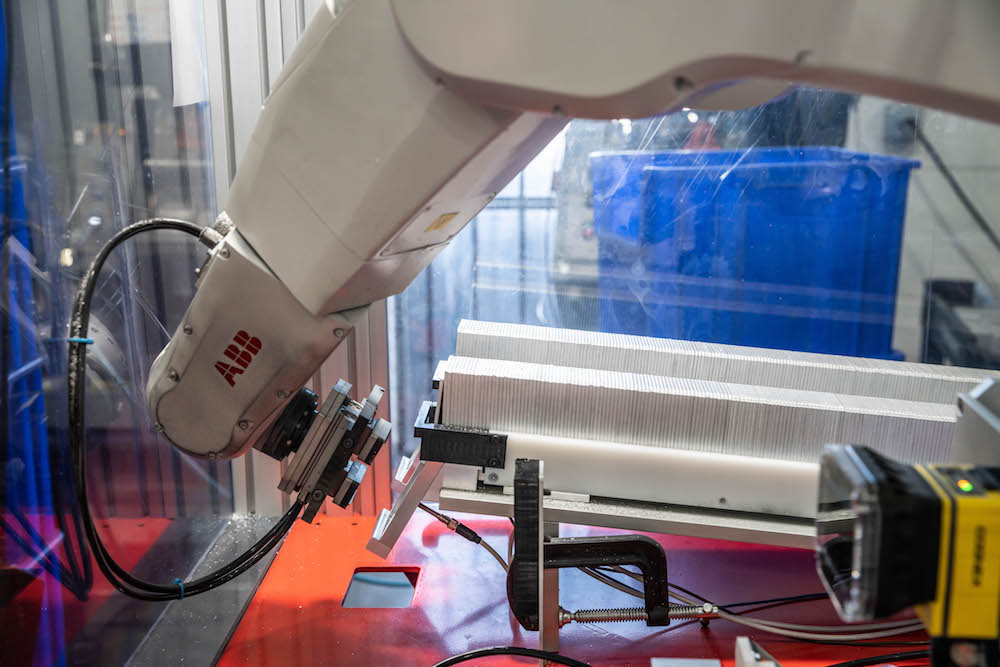
Three ABB IRB 1200 industrial robots help GRIP6 manufacture belts and buckles. Two of the robots cut belt buckles, and the third is in final testing for an application finishing the ends of belt straps. | Credit: ABB
BJ Minson didn’t like the imperfect fit and sloppy profile of the standard belts he could find on the market, with the buckle and excess strap end awkwardly protruding from under his untucked shirt. So while working on a master’s degree in microfluidics, he began playing around with the design for a sleeker belt with a more precise grip.
Already equipped with a master’s degree in mechanical engineering and a keen interest in product design, what started as a diversion from his ongoing studies became a preoccupation as Minson got closer to a breakthrough design. Ready access to a laser cutter allowed for the testing of a wide range of buckle concepts, and eventually the Eureka moment came, and Minson discovered the perfect buckle and belt design: firm fit, low profile, no holes and no strap flap.
As alluring is a career in microfluidics, Minson put that aside and founded GRIP6, a company built on the merits of his innovative belt design. Five years later, Midvale, Utah-based GRIP6 has a seven figure annual advertising budget, and an abundant volume of its belts and accessories are sold online and in over 250 U.S. retail locations.
Early Production
The early production was the proverbial garage-based operation, selling a few hundred belts a month. Once Minson added staff and ramped up the marketing engine, monthly volumes grew into the thousands and GRIP6 moved to a dedicated facility.
The highly crafted, metal buckle is the key component of the unique belt design, and its production must be precise. The initial buckle fabricating and finishing was very labor intensive, with employees using off-the-shelf processing equipment to cut, sand and finish each piece.
An engineer Minson hired in 2016 designed some processing equipment in-house to alleviate a portion of the manual burden. Routers with chamfer bits made the 45 degree cuts on the belt edges and orbital sanders refined the surfaces. The machines were durable and easy to maintain, and while they adequately increased throughput and minimized variable costs, each workstation was dedicated to only one buckle design.
Steady sales volume increases were spurred both by increased brand awareness and the proliferation of buckle shapes, sizes and designs, some of which became more intricate and production intensive.
Minson describes a pivotal point in his effort to continually improve manufacturing processes, “Our in-house team did a really good job designing equipment, but very often it was to make a specific part. As our product line expanded we built more and more specialized equipment. We got to the point where we maxed out on that approach and needed something that would accommodate more product variety with the same quality and speed.”
Exploring robotic automation
Earlier in his career, Minson worked briefly at a medical products company that used SCARA robots. He was impressed with how they worked and bought an entry-level model with a vision system for GRIP6, in hopes that it could do some light machining, cutting off corners and smoothing edges of the aluminum buckles. It worked well in cutting straight lines, but its software limitations made it very difficult to follow a curved edge or anything more elaborate.
Still convinced that robotic automation was the proper technology to pursue, Minson and team set out to find a more capable robot. Faster and more agile, but more importantly, one with advanced programming software, ideally that worked well with SOLIDWORKS, able to take a solid model and find a path along more intricate edges.
After some extensive research GRIP6 found that RobotStudio, ABB’s simulation programming software, could be directly integrated with SOLIDWORKS.
Powerful programming software
“It’s really easy when you have the CAD file from the SOLIDWORKS design of the belt. You just pull it into RobotStudio and easily set up a program where the robot just traces that path,” said Minson. “Of all the major robot brands ABB was our choice based mostly on the power of the software.”
With RobotStudio, GRIP6 could use the same robot to handle a variety of different buckles, streamlining production and making it easier to introduce new buckle designs. Producing buckles with some sort of cutout pattern or non-uniform outside profiles became far easier, leading to more creative designs and shorter development cycles.
The simulations created in RobotStudio are virtually identical to how a robot and the ancillary system components will perform on the factory floor, allowing users to optimize the system layout to achieve the necessary robot paths with the best cycle times. The simulations also helped determine the ideal specifications for the robot model that GRIP6 would select for its initial application, and to prove the performance of the most efficient robot cell.
Though GRIP6 did send an engineer to a week-long programming class at ABB’s headquarters in Auburn Hills, Michigan, the software is highly intuitive; accommodating to those who are so inclined to do-it-yourself robot programming and commissioning.
“We had good support from our regional ABB account rep, but we did most of our own system design, programming and installation. I think that says a lot about the simplicity of the software,” said Minson. “It’s also easily scalable, allowing minor alterations to existing programs to be cut and paste for differing buckle designs.”
Compact, flexible ABB robots
GRIP6 purchased an ABB IRB 1200 robot in the latter part of 2019, and bought two more identical models approximately six months later. Two of the robots are cutting belt buckles, and the third is in final testing for an application finishing the ends of belt straps.
The ABB IRB 1200 is considered a small 6-axis industrial robot, weighing approximately 120 lbs. (54 kg), with a tapered base that can be floor, side or invert mounted, easily installed in a compact space or existing production line. IP 40 protection is standard, with IP 67 models available. These attributes and the reach of 0.9 meters were the major factors in selecting the IRB 1200.
Buckle cutting
GRIP6 currently has seventy men’s and women’s buckle designs that vary in size, design and finish. They all have two identical parallel slots inside each vertical edge, one where the strap is attached, and one on the opposite end where the strap end is inserted to secure the desired fit.
The production process begins with buckle profiles and their respective strap slots being laser cut from a large sheet of aluminum. The “blanks” are then then manually placed into a 250-unit capacity feeder cartridge, from which a robot accesses one piece at a time throughout the secondary cutting cycle.
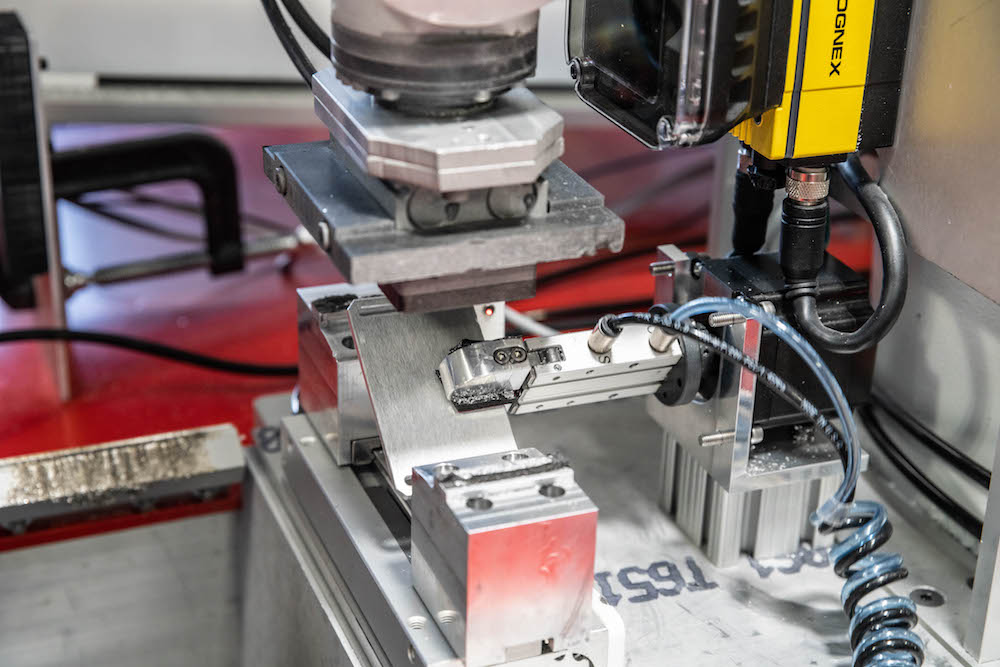
The robot initiates the secondary cutting process by grabbing a buckle by the two slots, and presenting it to a stationary router installed inside a protective case. The robot moves the buckle edges around the router, equipped with a 90° countersink cutter point, beveling a 45° chamfered edge on the entire outside edge of each side of the buckle, pulling the buckle out of the machining area after completing the front side, to reorient the buckle to process the back side.
During the process, the robot also does a full chamfered cut along insides of both slots, which provides the friction that holds strap length in place in the absence of holes. Once complete the buckles are put onto a conveyor that routes them to a staging area for the finishing and painting station.
The end-of-arm-tool that holds the buckle is a fairly simple pneumatic actuator with a rail in the center, and two pieces that slide open and closed to grasp the belt slots. A lip on each piece glides into the slot, so when it’s wide open it lands exactly in the center of the slots. It only has to close an eighth of an inch to secure the buckle.
To provide the highest cut quality, GRIP6 installed a Cognex camera in front of the base of each ABB cutting robot, integrated with the robot controller. After the robot picks each buckle from the feeder, it pauses for a second so the camera can verify a secure pickup and define the exact origin of the buckle in the robot’s grip. This information is conveyed to the robot to ensure it presents the buckle accurately to the router. Highly precise cuts are especially critical for the inner slots which hold the strap in place. Any cuts that are too deep or not deep enough adversely affect product performance.

Increased throughput, less waste
With the cutting programs for each buckle SKU created in Robot Studio and downloaded to the robot controller, the robots can easily cut varying buckle models within a single production cycle.
When four, 250-unit capacity feeder cartridges are loaded and staged, a single robot can run uninterrupted for nearly twelve hours, cutting approximately 83 buckles per hour. In a 24-hour period both ABB robots combined can cut 4,000 buckles, which is 33% more than the 3,000 five production workers could do manually in the same timeframe, with far less waste.
“We have been running 12 to 16 hours a day, but our goal is to soon run 24 hours a day with the robots, meaning there would be eight hours a day when they would be operating when the building is dark,” said Minson. “The former employees who did the manual cutting have been moved to less physically stressful jobs. We have plenty for everybody to do.”
Despite its early success, GRIP6 is still very much in the early growth stage, continually expanding its line of belts while venturing into other product categories such as clothing and wallets. Through it all Minson strives to handle as much of the product development and manufacturing advancements in-house, building a versatile staff that is largely self-sufficient. He and his team are proud to source materials and manufacture high quality products in America.
“The installation of the ABB robots gave us something to rally around as team, taking pride in improving our production efficiency while freeing up staff members to focus on more growth oriented tasks within the business,” said Minson. “Now that we know what RobotStudio can do, we will definitely be looking to further automation.”




Tell Us What You Think!